Линейные и нелинейные системы управления
Линейные системы управления – это системы, которые подчиняются принципу суперпозиции, заключающемся в том, что реакция объекта управления на сумму входных сигналов равняется сумме реакций на каждый сигнал в отдельности.
Линейные системы описываются линейными дифференциальными уравнениями, в которых функция и все ее производные содержатся в первой степени. Линейность статических характеристик является необходимым условием, но при этом недостаточным для линейности системы.
Большинство реальных объектов являются нелинейными. Однако, если нелинейность проявляется в статическом режиме, статические характеристики описываются аналитическими функциями, то при определенных условиях нелинейные характеристики могут быть могут быть заменены приближенными линейными характеристиками, то есть осуществляется линеаризация нелинейных зависимостей. Самым распространенными способом линеаризации является разложение нелинейной функции в ряд Тейлора в окрестности заданной точки и переход к новой системе координат, причем, в данном случае линеаризация содержит только первые члены ряда Тейлора, линейные относительно новых координат. Линейные объекты описываются обычными дифференциальными уравнениями, в общем случае записываемые в виде полинома производных во времени от входа и выхода объекта.
Нелинейные системы управления и их отличия от линейных систем
Нелинейная система – это система, в состав которой входит минимум одно звено, описываемое нелинейным уравнением и называемое нелинейным элементом.
Уравнение нелинейно, если его координаты или их производные по времени входят в составляемое уравнение в виде произведений или степени, которая отлична от первой, а также в том случае, если коэффициенты уравнения представляют собой функции некоторых координат или их производных. При составлении дифференциальных уравнений для нелинейных систем сначала они составляются для каждого элемента системы (устройства), при этом характеристики устройств, которые допускают линеаризацию, линеаризуются. В результате этого получается система дифференциальных уравнений, где одно или несколько уравнений нелинейны. Устройства, которые допускают линеаризацию — образуют линейную часть уравнения, а устройства, не линеаризованные, составляют нелинейную часть.
Нелинейные элементы классифицируются по разным признакам. Самой распространенной классификацией является классификация по динамическим и статическим характеристикам, потому что в системах, как правило, нелинейности приходится учитывать в виде характеристик. Данные характеристики могут быть однозначными или двузначными, симметричными или несимметричными относительно начала координат. Различают следующие типы нелинейных звеньев:
- Нелинейные звенья с гладкими криволинейными характеристиками.
- Нелинейные звенья с кусочно-линейными характеристиками.
- Релейные звенья, в которые на выходе выдают конечное число фиксированных значений.
- Нелинейные вычислительные звенья, к которым относятся логическое, множительное и другие виды звеньев.
Нелинейности могут быть статическими и динамическими. Статические представляются в виде нелинейных статических характеристик, а вторые в виде нелинейных дифференциальных уравнений. Поведение нелинейных систем в случае наличия значительных нелинейностей существенно отличается от поведения их линейных моделей:
Общие понятия и особенности нелинейных систем
Строго говоря, линейных систем в природе не существует, так как характеристики реальных устройств нелинейные и некоторые из них не могут быть линеаризованы, например, характеристика логического элемента. Кроме того, есть системы, например, релейные, адаптивные, в которых принципиально необходимо учитывать нелинейности.
Нелинейной системой называется такая система, в состав которой входит хотя бы одно звено, описываемое нелинейным уравнением. Такое звено называется нелинейным звеном или нелинейным элементом.
Уравнение является нелинейным, если некоторые координаты или их производные по времени входят в уравнение в виде произведений или степени, отличной от первой, а также если коэффициенты уравнения являются функциями некоторых координат или их производных.
При составлении дифференциальных уравнений нелинейных систем сначала составляют дифференциальные уравнения для каждого устройства системы. При этом характеристики устройств, допускающих линеаризацию, линеаризуются. В результате получают систему дифференциальных уравнений, в которой одно или несколько уравнений нелинейные. Устройства, допускающие линеаризацию, образуют линейную часть системы, а устройства, которые не могут быть линеаризованы, составляют нелинейную часть.
Путем эквивалентного преобразования структурных схем и нелинейных звеньев большое число нелинейных систем можно представить в виде замкнутого контура с последовательным включением нелинейного элемента (НЭ) и линейной части (ЛЧ), как показано на рис. 2.1.
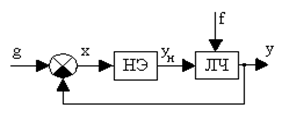
Рис. 2.1. Функциональная схема нелинейной системы:
НЭ — нелинейный элемент; ЛЧ — линейная часть
Классификация нелинейных элементов и систем. Нелинейные звенья классифицируются по различным признакам. Наибольшее распространение получила классификация по статическим и динамическим характеристикам, так как в системах чаще всего нелинейности приходится учитывать в виде характеристик. Эти характеристики могут быть как однозначными, так и двузначными (петлевыми), симметричными и несимметричными относительно начала координат.
Различают следующие основные типы нелинейных звеньев.
Нелинейные звенья с гладкими криволинейными характеристи ка ми. Примеры таких характеристик приведены на рис. 2.2.
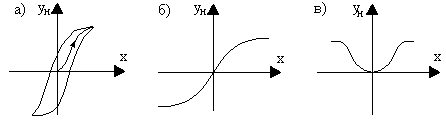
Рис. 2.2. Гладкие криволинейные характеристики:
а — гистерезисная; б, в — усилительные
На рис. 2.2,а изображена двузначная гистерезисная (запаздывающая) характеристика. Характеристика (рис. 2.2,б) отображает насыщение или ограничение и соответствует реальному амплитудному усилителю, а характеристика (рис. 2.2,в) — реальному усилителю мощности. Характеристики (рис. 2.2,а и б) -нечетно-симметричные, а характеристика (рис. 2.2,в) — четно-симметричная.
Нелинейные звенья с кусочно-линейными характеристиками. Некоторые из таких характеристик представлены на рис. 2.3.
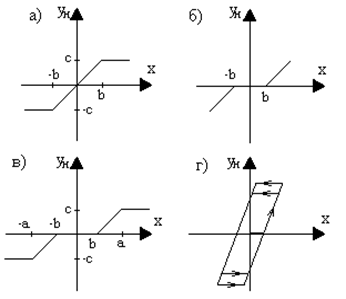
Рис. 2.3. Кусочно-линейные характеристики:
а — с насыщением; б — с зоной нечувствительности;
в — с насыщением и зоной нечувствительности; г — люфт
Характеристика (рис. 2.3,а) отображает насыщение, характеристика (рис. 2.3,б) — зону нечувствительности, а характеристика (рис. 2.3,в) соответствует звену, обладающему одновременно зоной нечувствительности и насыщением. Характеристика (рис. 2.3,г) позволяет учесть люфт или зазор кинематической передачи.
Релейные звенья — это элементы, которые на своем выходе выдают конечное число фиксированных значений. Три наиболее типовые релейные характеристики изображены на рис. 2.4.
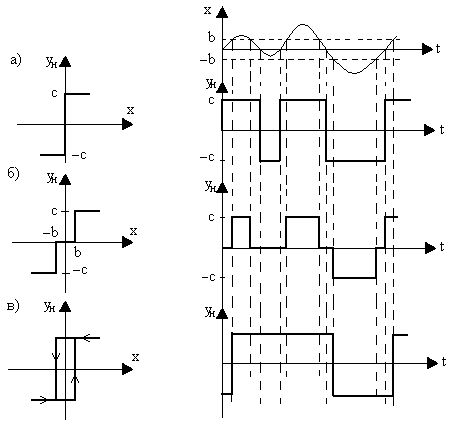
Рис. 2.4. Релейные характеристики:
а — идеальная; б — с зоной нечувствительности; в — гистерезисная
Характеристика (рис. 2.4,а) соответствует идеальному двухпозиционному реле, характеристика (рис. 2.3,б) — трехпозиционному реле с зоной нечувствительности, а характеристика (рис. 2.3,в) — двухпозиционному поляризованному реле.
Кроме того, на рис. 2.4 показано прохождение непрерывного сигнала через соответствующие типы реле. Откуда следует, что коэффициент передачи реле зависит от величины входного воздействия.
Для улучшения динамических свойств систем специально созданы нелинейные звенья с опережающими двузначными статическими характеристиками.
Часто встречаются элементы с несимметричными относительно начала координат статическими характеристиками.
Нелинейные вычислительные звенья, например, множительное, логическое звено и другие.
Различают статические и динамические нелинейности. Первые представляются в виде нелинейных статических характеристик, а вторые — в виде нелинейных дифференциальных уравнений.
Нелинейные системы обычно классифицируются в соответствии с видом входящих в них нелинейных звеньев.
Особенности нелинейных систем. Поведение нелинейных систем, при наличии существенных нелинейностей, значительно отличается от поведения их линейных моделей [10].
1. Выходная величина нелинейной системы непропорциональна входному воздействию; форма реакции системы зависит от величины входного воздействия.
2. Характер процессов в нелинейной системе зависит от величины начального отклонения, вызванного возмущением. В связи с этим для нелинейных систем существуют понятия об устойчивости “в малом”, “в большом”, “в целом”.
Система устойчива “в малом”, если она устойчива при малых (бесконечно малых) начальных отклонениях. Система устойчива “в большом”, если она устойчива при больших (конечных по величине) начальных отклонениях. Система устойчива “в целом”, если она устойчива при любых больших (неограниченных по величине) начальных отклонениях.
3. Для нелинейных систем характерен режим незатухающих периодических колебаний с постоянной амплитудой и частотой (автоколебаний), возникающий в системах при отсутствии периодических внешних воздействий.
4. При затухающих колебаниях переходного процесса в нелинейных системах происходит изменение периода колебаний.
Основные задачи исследования нелинейных систем. Методы исследования. Задачами исследования нелинейных систем являются:
1) отыскание возможных состояний равновесия системы и исследование их устойчивости;
2) определение автоколебаний и анализ их устойчивости;
3) исследование процессов перехода системы к тому или иному установившемуся состоянию при различных начальных отклонениях.
Начало исследования нелинейных систем обычно связано с рассмотрением устойчивости и определением автоколебаний.
В настоящее время не создано общей теории анализа нелинейных систем. Разработанные методы позволяют решать лишь отдельные нелинейные задачи.
Все инженерные методы исследования нелинейных систем разделяются на две основные группы.
Точные методы, например, метод А.М.Ляпунова, метод фазовой плоскости, метод точечных преобразований, частотный метод В.М.Попова, основаны на точном решении нелинейного дифференциального уравнения, может быть и упрощенного.
Приближенные методы, такие как метод гармонической линеаризации, метод статистической линеаризации, основаны на линеаризации нелинейного уравнения системы.
Мощным и эффективным методом исследования нелинейных систем является моделирование, инструментарием которого служит компьютер. В настоящее время многие сложные для аналитического решения теоретические и практические вопросы сравнительно легко могут быть решены с помощью вычислительной техники.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Раздел 6. НЕЛИНЕЙНЫЕ СИСТЕМЫ
Строго говоря, линейных систем в природе не существует, так как характеристики реальных устройств нелинейные и некоторые из них не могут быть линеаризованы, например, характеристика логического элемента. Кроме того, есть системы, например, релейные, адаптивные, в которых принципиально необходимо учитывать нелинейности.
Нелинейной системой называется такая система, в состав которой входит хотя бы одно звено, описываемое нелинейным уравнением. Такое звено называется нелинейным звеном или нелинейным элементом.
Уравнение является нелинейным, если некоторые координаты или их производные по времени входят в уравнение в виде произведений или степени, отличной от первой, а также если коэффициенты уравнения являются функциями некоторых координат или их производных.
При составлении дифференциальных уравнений нелинейных систем сначала составляют дифференциальные уравнения для каждого устройства системы. При этом характеристики устройств, допускающих линеаризацию, линеаризуются. В результате получают систему дифференциальных уравнений, в которой одно или несколько уравнений нелинейные. Устройства, допускающие линеаризацию, образуют линейную часть системы, а устройства, которые не могут быть линеаризованы, составляют нелинейную часть.
Путем эквивалентного преобразования структурных схем и нелинейных звеньев большое число нелинейных систем можно представить в виде замкнутого контура с последовательным включением нелинейного элемента (НЭ) и линейной части (ЛЧ), как показано на рис. 6.1.
На рисунке 6.1 приняты следующие обозначения: НЭ — нелинейный элемент; ЛЧ — линейная часть.
Классификация нелинейных элементов и систем. Нелинейные звенья классифицируются по различным признакам. Наибольшее распространение получила классификация по статическим и динамическим характеристикам, так как в системах чаще всего нелинейности приходится учитывать в виде характеристик. Эти характеристики могут быть как однозначными, так и двузначными (петлевыми), симметричными и несимметричными относительно начала координат.
Различают следующие основные типы нелинейных звеньев.
Нелинейные звенья с гладкими криволинейными характеристиками. Примеры таких характеристик приведены на рис. 6.2.
На рис. 6.2, а изображена двузначная гистерезисная (запаздывающая) характеристика. Характеристика (рис. 6.2, б) отображает насыщение или ограничение и соответствует реальному амплитудному усилителю, а характеристика (рис. 6.2, в) — реальному усилителю мощности. Характеристики (рис. 6.2, а и б) − нечетносимметричные, а характеристика (рис. 6.2, в) − четно-симметричная.
Нелинейные звенья с кусочно-линейными характеристиками. Некоторые из таких характеристик представлены на рис. 6.3.
Характеристика (рис. 6.3, а) отображает насыщение, характеристика (рис. 6.3, б) − зону нечувствительности, а характеристика (рис. 6.3, в) соответствует звену, обладающему одновременно зоной нечувствительности и насыщением. Характеристика (рис. 6.3, г) позволяет учесть люфт или зазор кинематической передачи.
Релейные звенья − это элементы, которые на своем выходе выдают конечное число фиксированных значений. Три наиболее типовые релейные характеристики изображены на рис. 6.4.
Рис. 6.4. Релейные характеристики:
Характеристика (рис. 6.4, а) соответствует идеальному двухпозиционному реле, характеристика (рис. 6.4, б) − трехпозиционному реле с зоной нечувствительности, а характеристика (рис. 6.4, в) − двухпозиционному поляризованному реле.
Кроме того, на рис. 6.4 показано прохождение непрерывного сигнала через соответствующие типы реле. Откуда следует, что коэффициент передачи реле зависит от величины входного воздействия.
Для улучшения динамических свойств систем специально созданы нелинейные звенья с опережающими двузначными статическими характеристиками.
Часто встречаются элементы с несимметричными относительно начала координат статическими характеристиками.
Нелинейные вычислительные звенья, например, множительное, логическое звено и другие.
Различают статические и динамические нелинейности. Первые представляются в виде нелинейных статических характеристик, а вторые — в виде нелинейных дифференциальных уравнений.
Нелинейные системы обычно классифицируются в соответствии с видом входящих в них нелинейных звеньев.
Особенности нелинейных систем. Поведение нелинейных систем, при наличии существенных нелинейностей, значительно отличается от поведения их линейных моделей.
1. Выходная величина нелинейной системы непропорциональна входному воздействию; форма реакции системы зависит от величины входного воздействия.
2. Характер процессов в нелинейной системе зависит от величины начального отклонения, вызванного возмущением. В связи с этим для нелинейных систем существуют понятия об устойчивости “в малом”, “в большом”, “в целом”.
Система устойчива “в малом”, если она устойчива при малых (бесконечно малых) начальных отклонениях. Система устойчива “в большом”, если она устойчива при больших (конечных по величине) начальных отклонениях. Система устойчива “в целом”, если она устойчива при любых больших (неограниченных по величине) начальных отклонениях.
3. Для нелинейных систем характерен режим незатухающих периодических колебаний с постоянной амплитудой и частотой (автоколебаний), возникающий в системах при отсутствии периодических внешних воздействий.
4. При затухающих колебаниях переходного процесса в нелинейных системах происходит изменение периода колебаний.
Основные задачи исследования нелинейных систем. Методы исследования . Задачами исследования нелинейных систем являются:
1) отыскание возможных состояний равновесия системы и исследование их устойчивости;
2) определение автоколебаний и анализ их устойчивости;
3) исследование процессов перехода системы к тому или иному установившемуся состоянию при различных начальных отклонениях.
Начало исследования нелинейных систем обычно связано с рассмотрением устойчивости и определением автоколебаний.
В настоящее время не создано общей теории анализа нелинейных систем. Разработанные методы позволяют решать лишь отдельные нелинейные задачи.
Все инженерные методы исследования нелинейных систем разделяются на две основные группы.
Точные методы, например, метод А.М.Ляпунова, метод фазовой плоскости, метод точечных преобразований, частотный метод В.М.Попова, основаны на точном решении нелинейного дифференциального уравнения, может быть и упрощенного.
Приближенные методы, такие как метод гармонической линеаризации, метод статистической линеаризации, основаны на линеаризации нелинейного уравнения системы.
Мощным и эффективным методом исследования нелинейных систем является моделирование, инструментарием которого служит компьютер. В настоящее время многие сложные для аналитического решения теоретические и практические вопросы сравнительно легко могут быть решены с помощью вычислительной техники.
6.2. Прямой метод Ляпунова
Наиболее общие результаты по исследованию устойчивости нелинейных систем могут быть получены по методу А.М. Ляпунова.
При использовании прямого метода Ляпунова, именуемого также второй методой Ляпунова, исследуемая система описывается дифференциальными уравнениями в форме уравнений первого порядка, полагая, что они записаны для переходного процесса в отклонениях всех переменных x i (i = 1, 2, . , n) от их значений в установившемся процессе при новых постоянных значениях возмущающего f = f 0 и задающего g = g 0 воздействий. Следовательно, эти уравнения для нелинейной системы n-го порядка будут:
dx dt i = F i (x 1 ,x 2 . x n )
где F i — нелинейные функции произвольного вида, удовлетворяющие условию
F 1 = F 2 = . = F n = 0 при x 1 = x 2 = . = x n = 0, (6.2)
так как в установившемся состоянии все отклонения и их производные равны нулю.
Чтобы исследовать устойчивость по Ляпунову, необходимо подобрать некоторую знакоопределенную функцию V и вычислить производную по времени от этой функции.
Функция V называется знакоопределенной в некоторой области, если она во всех точках этой области в окрестности начала координат сохраняет один и тот же знак и нигде не обращается в нуль, кроме начала координат.
Функция V называется знакопостоянной, если она сохраняет один и тот же знак, но может обращаться в нуль не только в начале координат, но и в других точках данной области.
Функция V называется знакопеременной, если она в данной области вокруг начала координат может иметь разные знаки.
Функция Ляпунова и ее производная по времени . Любая функция
V = V(x 1 , x 2 , . x n ),
тождественно обращающаяся в нуль при x 1 = x 2 = . = x n = 0, называется функцией
Ляпунова, если в ней в качестве x 1 , x 2 , . x n
взяты переменные, в которых записа-
ны уравнения (6.1) для этой системы.
Производная от функции Ляпунова (6.3) по времени будет
(i = 1, 2, . , n) из уравнений системы (2.1), получим
d V = ∑ ∂ V F (x , x . x
Следовательно, производная от функции Ляпунова по времени, так же как и
сама V, является функцией координат системы
d t = W (x 1 , x 2 . x n ),
причем согласно свойству (6.2) эта функция W, так же как и сама V, тождественно обращается в нуль при x 1 = x 2 = . = x n = 0. Поэтому к ней в одинаковой степени можно применять те же понятия знакоопределенности, знакопостоянства и знакопеременности в некоторой области вокруг начала координат.
Теорема Ляпунова об устойчивости нелинейных систем: если при заданных в форме (6.1) уравнениях системы n -го порядка можно подобрать такую знакоопределенную функцию Ляпунова V(x 1 , x 2 , . x n ), чтобы ее производная по времени W(x 1 , x 2 , . x n ), тоже была знакоопределенной (или знакопостоянной), но имела знак, противоположный знаку V, то данная система устойчива; при знакоопределенной функции W будет иметь место асимптотическая устойчивость.
Теорема Ляпунова о неустойчивости нелинейных систем: если при заданных в форме (6.1) уравнениях системы n-го порядка производная по времени W(x 1 , x 2 , . x n ) от какой-нибудь функции Ляпунова V(x 1 , x 2 , . x n ) окажется знакоопределенной, причем сама функция V в какой-нибудь области, примыкающей к началу координат, будет иметь знак, одинаковый со знаком производной W, то данная система неустойчива.
Замечания к теореме Ляпунова об устойчивости .
1. При заданных в форме (6.1) уравнениях системы выбор функции V неоднозначен, поэтому данная теорема Ляпунова обеспечивает получение достаточных условий устойчивости, которые не всегда будут и необходимыми, т.е. при выполнении условий теоремы система наверняка будет устойчивой, но эти условия могут не охватывать всей области устойчивости системы по параметрам.
2. Понятие устойчивости по Ляпунову допускает, что при знакоопределенной функции V производная от нее по времени W была не обязательно знакоопределенной или знакопостоянной, а могла быть и тождественно равна нулю. В результате система хотя и не будет асимптотически приближаться к установившемуся состоянию, но все же будет все время в достаточной близости от него.
Нелинейная система (рис. 6.1) с одним нелинейным элементом с однозначной статической характеристикой
в свободном состоянии может быть представлена в виде замкнутого контура, включающего в себя линейную часть (ЛЧ) и нелинейный элемент (НЭ) (рис. 6.5).
При этом уравнения свободного движения системы (g = 0) будут
где σ = ∑ c k x k ;
a ij , b i , c k — постоянные коэффициенты.
Тогда задача исследования нелинейной системы (6.7) по Ляпунову сводится к определению функции V и ее производной
А.И.Лурье предложил функцию Ляпунова выбирать в виде суммы функции квадратичной формы L(x) и интеграла от нелинейной функции F( σ ) рассматриваемой системы
V = L(x) + ∫ F( σ )d σ ,
Нелинейная система называется абсолютно устойчивой, если она устойчива при любых начальных отклонениях и любой форме нелинейной характеристики, удовлетворяющей условиям:
где k — заданное число.
6.3. Частотный метод В.М. Попова
Частотный метод В.М. Попова решает задачу об абсолютной устойчивости системы с одной однозначной нелинейностью, заданной предельным значением коэффициента передачи k нелинейного элемента.
Если в системе управления (рис. 6.5) имеется лишь одна однозначная нелинейность
то, объединив вместе все остальные звенья системы в линейную часть, можно получить ее передаточную функцию W лч (s).
Нелинейность y н = F(x) имеет любое очертание, не выходящее за пределы заданного угла arctg k (рис. 6.6), т.е. при любом x
На рисунке 6.6, а показан нелинейный элемент; на рисунке 6.6, б — статические характеристики.
Теорема В.М. Попова: для установления абсолютной устойчивости нелинейной системы достаточно подобрать такое конечное действительное число q, при котором для всех частот ω ≥ 0
Re[(1+ j ω q)W ЛЧ (j ω )] +
где k — предельное значение коэффициента передачи нелинейного элемента;
W ЛЧ (j ω ) — амплитудно-фазовая частотная характеристика линейной части системы.
Все полюсы передаточной функции линейной части системы должны быть с отрицательными вещественными частями или же кроме них имеется еще не более двух нулевых. При наличии одного нулевого полюса требуется еще, чтобы
Im W ЛЧ (j ω ) → −∞ при ω → 0,
а при двух нулевых полюсах
Re W ЛЧ (j ω ) → −∞ при ω → 0, а Im W ЛЧ (j ω ) < 0 при малых ω .
Другая формулировка той же теоремы, дающая удобную графическую интерпретацию, связана с введением видоизмененной частотной характеристики линейной части системы W*(j ω ), которая определяется следующим образом:
V * (j ω ) = Im W * (j ω ) = ω T Im W
где T 0 = 1 с — нормирующий множитель. Преобразовав левую часть неравенства (6.13)
Re[(1+ j ω q)W ЛЧ (j ω )] + 1 k = Re W ЛЧ (j ω ) − ω q Im W ЛЧ (j ω )] + 1 k
и использовав соотношения (6.14), получим вместо (6.13) для теоремы В.М. Попова условие
при всех ω ≥ 0. Очевидно, что равенство
представляет собой уравнение прямой на плоскости W * (j ω ). Эта прямая, называемая прямой Попова, проходит через точку с координатами [ − 1/k, j0] и имеет угловой коэффициент наклона к оси абсцисс 1/q.
Отсюда вытекает графическая интерпретация теоремы В.М.Попова: для установления абсолютной устойчивости нелинейной системы достаточно подобрать такую прямую на комплексной плоскости W * (j ω ), проходящую через точку
( − 1 k , j0), чтобы вся кривая W * (j ω ) лежала справа от этой прямой.
Условия выполнения теоремы показаны на рис. 6.7.
На рис. 6.7, а приведен случай абсолютной устойчивости нелинейной системы при любой форме однозначной нелинейности, ограниченной лишь условием (6.12), а рис. 6.7, б соответствует случаю невыполнения теоремы, т.е. нелинейная система не имеет абсолютной устойчивости.
Таким образом, для определения абсолютной устойчивости нелинейной системы по методу В.М. Попова необходимо построить видоизмененную частотную характеристику линейной части системы W * (j ω ), определить предельное зна-
чение коэффициента передачи k нелинейного элемента из условия 0 ≤ F(x) ≤ k и че-
рез точку ( − 1 k ) на вещественной оси комплексной плоскости провести некоторую
прямую так, чтобы характеристика W * (j ω ) лежала справа от этой прямой. Если такую прямую провести нельзя, то это значит, что абсолютная устойчивость для данной системы невозможна. Величина q, связанная с угловым коэффициентом, при этом определяется из условия (6.15) так, чтобы при известных параметрах системы неравенство соблюдалось для всех частот. Очертание нелинейности может быть неизвестным. Необходимо знать лишь, в пределах какого угла arctg k (рис. 6.6, б) она расположена. Для конкретно заданных форм нелинейности область устойчивости будет несколько шире, но данным методом это не определяется.
Дополнение: неравенство (6.13) является так же достаточным условием абсолютной устойчивости нелинейной системы и при k → ∞ .
6.4. Метод гармонической линеаризации
Идея метода гармонической линеаризации принадлежит Н.М. Крылову и Н.Н. Боголюбову и базируется на замене нелинейного элемента системы линейным звеном, параметры которого определяются при гармоническом входном воздействии из условия равенства амплитуд первых гармоник на выходе нелинейного элемента и эквивалентного ему линейного звена. Данный метод может быть
использован в том случае, когда линейная часть системы является низкочастотным фильтром, т.е. отфильтровывает все возникающие на выходе нелинейного элемента гармонические составляющие, кроме первой гармоники.
Коэффициенты гармонической линеаризации и эквивалентные комплексные коэффициенты передачи нелинейных элементов. В нелинейной системе (рис. 6.1) параметры линейной части и нелинейного элемента выбирают таким образом, чтобы существовали симметричные периодические колебания с частотой ω .
В основе метода гармонической линеаризации нелинейностей (рис. 6.10), описываемых уравнением
лежит предположение, что на вход нелинейного элемента подается гармоническое воздействие с частотой ω и амплитудой a , т.е.
x = a sin ψ , где ψ = ω t,
а из всего спектра выходного сигнала выделяется только первая гармоника
y н1 = a н1 sin( ψ + ψ н1 ),
где a н1 — амплитуда а ψ н1 — фазовый сдвиг;
при этом высшие гармоники отбрасываются и устанавливается связь между первой гармоникой выходного сигнала и входным гармоническим воздействием нелинейного элемента.
В случае нечувствительности нелинейной системы к высшим гармоникам нелинейный элемент может быть в первом приближении заменен некоторым элементом с эквивалентным коэффициентом передачи, который определяет первую гармонику периодических колебаний на выходе в зависимости от частоты и амплитуды синусоидальных колебаний на входе.
Для нелинейных элементов с характеристикой (6.17) в результате разложения периодической функции F(x) в ряд Фурье при синусоидальных колебаниях на входе (6.18) получим выражение для первой гармоники сигнала на выходе
y н1 = b 1F sin ψ + a 1F cos ψ , (6.20)
где b 1F , a 1F — коэффициенты разложения в ряд Фурье, определяющие амплитуды соответственно синфазной и квадратурной составляющих первой гармоники, которые определяются по формулам:
∫ F( a sin ψ ) sin ψ d ψ ,
∫ F( a sin ψ )cos ψ d ψ .
то связь между первой гармоникой периодических колебаний на выходе нелинейного элемента и синусоидальными колебаниями на его входе можно записать в виде
где q = b 1F / a , q ′ = a 1F / a .
Последнее уравнение называется уравнением гармонической линеаризации, а коэффициенты q и q ′ — коэффициентами гармонической линеаризации.
Таким образом, нелинейный элемент при воздействии гармонического сигнала с точностью до высших гармоник описывается уравнением (6.21), которое является линейным. Это уравнение нелинейного элемента отличается от уравнения линейного звена тем, что его коэффициенты q и q ′ изменяются при изменении амплитуды a и частоты ω колебаний на входе. Именно в этом заключается принципиальное отличие гармонической линеаризации от обычной, коэффициенты которой не зависят от входного сигнала, а определяются только видом характеристики нелинейного элемента.
Для различных видов нелинейных характеристик коэффициенты гармонической линеаризации сведены в таблицу. В общем случае коэффициенты гармонической линеаризации q( a , ω ) и q ′ ( a , ω ) зависят от амплитуды a и частоты ω колебаний на входе нелинейного элемента. Однако, для статических нелинейностей эти коэффициенты q( a ) и q ′ ( a ) являются функцией только амплитуды a входного гармонического сигнала, а для статических однозначных нелинейностей коэффициент q ′ ( a ) = 0.
Подвергнув уравнение (6.21) преобразованию по Лапласу при нулевых начальных условиях с последующей заменой оператора s на j ω (s = j ω ), получим эквивалентный комплексный коэффициент передачи нелинейного элемента
W Э (j ω , a ) = q + jq ′ = A Э ( ω , a ) e j ψ э( ω , a ) ,
где модуль и аргумент эквивалентного комплексного коэффициента передачи связаны с коэффициентами гармонической линеаризации выражениями
A Э ( ω , a ) = mod W Э (j ω , a ) =  [q( a , ω )] 2 + [q ′ ( a , ω )] 2 ;
[q( a , ω )] 2 + [q ′ ( a , ω )] 2 ;
ψ Э ( ω , a ) = arg W Э (j ω , A) = arctg[q ′ ( a , ω )/q( a , ω )].
Эквивалентный комплексный коэффициент передачи нелинейного элемента позволяет определить амплитуду и фазовый сдвиг первой гармоники (6.19) на выходе нелинейного элемента при гармоническом воздействии (6.18) на его входе, т.е.
a н1 = a × A Э ( ω , a ); ψ н1 = ψ Э ( ω , a ).
Исследование симметричных периодических режимов в нелинейных системах . При исследовании нелинейных систем на основе метода гармонической линеаризации в первую очередь решают вопрос о существовании и устойчивости периодических режимов. Если периодический режим устойчив, то в системе существуют автоколебания с частотой ω 0 и амплитудой a 0 .
Рассмотрим нелинейную систему (рис. 6.5), включающую в себя линейную часть с передаточной функцией
b 0 s m + b 1 s m − 1 + . + b m
и нелинейный элемент с эквивалентным комплексным коэффициентом передачи
W Э (j ω , a ) = q( ω , a ) + jq ′ ( ω , a ) = A Э ( ω , a ) e j ψ э( ω , a ) . (6.24)
Принимая во внимание выражение (6.21), можно записать уравнение нелинейной системы
Если в замкнутой нелинейной системе возникают автоколебания
x = a 0 sin ω 0 t
с постоянной амплитудой и частотой, то коэффициенты гармонической линеари-
зации оказываются постоянными, а вся система стационарной. Для оценки воз-
можности возникновения автоколебаний в нелинейной системе методом гармонической линеаризации необходимо найти условия границы устойчивости, как это делалась при анализе устойчивости линейных систем. Периодическое решение существует, если при a = a 0 и ω = ω 0 характеристическое уравнение гармонически линеаризованной системы
A(p) + B(p) × [q( ω , a ) + q ′ ( ω , a )
имеет пару мнимых корней λ i = j ω 0 и λ i+1 = − j ω 0 . Устойчивость решения необходимо оценить дополнительно.
В зависимости от методов решения характеристического уравнения различают методы исследования нелинейных систем.
Аналитический метод. Для оценки возможности возникновения в нелинейной системе автоколебаний в гармонически линеаризованный характеристический полином системы вместо p подставляют j ω
D(j ω , a ) = A(j ω ) + B(j ω ) × [q( ω , a ) + jq ′ ( ω , a )]. (6.27)
В результате получают уравнение D(j ω , a ) = 0, коэффициенты которого зависят от амплитуды и частоты предполагаемого автоколебательного режима. Выделив вещественную и мнимую части
Re D(j ω , a ) = X( ω , a );
Im D(j ω , a ) = Y( ω , a ),
X( ω , a ) + jY( ω , a ) = 0.
Если при действительных значениях a 0 и ω 0 выражение (6.28) удовлетворяется, то в системе возможен автоколебательный режим, параметры которого рассчитываются по следующей системе уравнений:
Из выражений (6.29) можно найти зависимость амплитуды и частоты автоколебаний от параметров системы, например, от коэффициента передачи k линейной части системы. Для этого необходимо в уравнениях (6.29) коэффициент передачи k считать переменной величиной, т.е. эти уравнения записать в виде:
X( ω 0 , a 0 , k) = 0;
По графикам a 0 = f(k), ω 0 = f(k) можно выбрать коэффициент передачи k, при котором амплитуда и частота возможных автоколебаний имеет допустимые значения или вообще отсутствует.
Частотный метод. В соответствии с критерием устойчивости Найквиста незатухающие колебания в линейной системе возникают в том случае, когда ампли- тудно-фазовая характеристика разомкнутой системы проходит через точку с координатами [ − 1, j0]. Данное условие является также условием существования автоколебаний в гармонически линеаризованный нелинейной системе, т.е.
W н (j ω , a ) = − 1.
Так как линейная и нелинейная части системы соединены последовательно,
то частотная характеристика разомкнутой нелинейной системы имеет вид
W н (j ω , a ) = W лч (j ω ) × W Э (j ω , a ).
Тогда в случае статической характеристики нелинейного элемента условие (6.31) принимает вид
Решение уравнения (6.33) относительно частоты и амплитуды автоколебаний можно получить графически как точку пересечения годографа частотной характеристики линейной части системы W лч (j ω ) и годографа обратной характеристики нелинейной части W э − 1 ( a ) , взятой с обратным знаком (рис. 6.9). Если эти го-
дографы не пересекаются, то режим автоколебаний в исследуемой системе не существует.
Для устойчивости автоколебательного режима с частотой ω 0 и амплитудой a 0 требуется, чтобы точка на годографе нелинейной части − W э − 1 ( a ) , соответст-
вующая увеличенной амплитуде a 0 + a по сравнению со значением в точке пересечения годографов, не охватывалась годографом частотной характеристики линейной части системы и охватывалась точка, соответствующая уменьшенной ам-
На рис. 6.9 дан пример расположения годографов для случая, когда в нелинейной системе существуют устойчивые автоколебания, так как a 3 < a 0 < a 4 .
Исследование по логарифмическим частотным характеристикам.
При исследовании нелинейных систем по логарифмическим частотным характеристикам условие (6.31) переписывают отдельно для модуля и аргумента эквивалентного комплексного коэффициента передачи разомкнутой нелинейной системы
mod W лч (j ω )W э (j ω , a ) = 1;
arg W лч (j ω )W э (j ω , a ) = − (2k+1) π , при k=0, 1, 2, .
с последующим переходом к логарифмическим амплитудной и фазовой характеристикам
L лч ( ω ) + L э ( ω , a ) = 0;
ψ лч ( ω ) + ψ э ( ω , a ) = − (2k+1) π , при k=0, 1, 2, .
Условия (6.34) и (6.35) позволяют определить амплитуду a 0 и частоту ω 0 периодического решения уравнения (6.25) по логарифмическим характеристикам линейной части системы L лч ( ω ), ψ лч ( ω ) и нелинейного элемента L э ( ω , a ), ψ э ( ω , a ).
Автоколебания с частотой ω 0 и амплитудой a 0 будут существовать в нелинейной системе, если периодическое решение уравнения (6.25) устойчиво. Приближенный метод исследования устойчивости периодического решения заключается в том, что исследуется поведение системы при частоте ω = ω 0 и значениях амплитуды a = a 0 + a и a = a 0 − a , где a > 0 — малое приращение амплитуды. При исследовании устойчивости периодического решения при a 0 + a и a 0 − a по логарифмическим характеристикам пользуются критерием устойчивости Найквиста.
В нелинейных системах с однозначными статическими характеристиками нелинейного элемента коэффициент гармонической линеаризации q ′ ( a ) равен ну-
лю, а следовательно, равен нулю и фазовый сдвиг ψ э ( a ), вносимый элементом. В этом случае периодическое решение уравнения системы
[A(p) + B(p) × q( a )]x = 0 (6.36)
существует, если выполняются условия:
L лч ( ω ) = − L э ( a );
ψ лч ( ω ) = − (2k+1) π , при k=0, 1, 2, .
Уравнение (6.38) позволяет определить частоту ω = ω 0 периодического решения, а уравнение (6.37) − его амплитуду a = a 0 .
При сравнительно простой линейной части решения этих уравнений могут быть получены аналитически. Однако в большинстве случаев их целесообразно решать графически (рис. 6.12).
При исследовании устойчивости периодического решения уравнения (6.36), т.е. при определении существования автоколебаний в нелинейной системе с однозначной нелинейной статической характеристикой пользуются критерием Найквиста: периодическое решение с частотой ω = ω 0 и амплитудой a = a 0 устойчиво, если при изменении частоты от нуля до бесконечности и положительном приращении амплитуды a > 0 разность между числом положительных (сверху вниз) и отрицательных (снизу вверх) переходов фазовой характеристики линейной части системы ψ лч ( ω ) через линию −π равна нулю в диапазоне частот, где
L лч ( ω ) ≥− L э ( ω 0 , a 0 + a ), и не равна нулю в диапазоне частот, где
L лч ( ω ) ≥− L э ( ω 0 , a 0 − a ).
На рис. 6.10 показан пример определения периодических решений в нелинейной системе с ограничением. В такой системе имеются три периодических решения с частотами ω 01 , ω 02 и ω 03 , определяемыми в точках пересечения фазовой характеристики ψ лч ( ω ) с линией − 180 0 . Амплитуды периодического решения a 01 , a 02 и a 03 определяются из условия (6.37) по логарифмическим амплитудным характеристикам нелинейного элемента − L э ( ω 01 , a ), − L э ( ω 02 , a ) и − L э ( ω 03 , a ).
Из трех решений, определенных на рис. 6.10, устойчивы два. Решение с частотой ω = ω 01 и амплитудой a = a 01 устойчиво, так как в диапазоне частот 1, где L лч ( ω ) ≥− L э ( ω 01 , a 01 + a ), фазовая характеристика ψ лч ( ω ) не пересекает линию − 180 0 , а в диапазоне частот 2, где L лч ( ω ) ≥− L э ( ω 01 , a 01 − a ), фазовая характеристика ψ лч ( ω ) один раз пересекает линию − 180 0 . Решение с частотой ω = ω 02 и амплитудой a = a 02 неустойчиво, так как в диапазоне частот, где L лч ( ω ) ≥− L э ( ω 02 , a 02 + a ), фазовая характеристика ψ лч ( ω ) один раз пересекает линию − 180 0 . Высокочастотное периодическое решение с частотой ω = ω 03 и амплитудой a = a 03 устойчиво, так как в диапазоне частот, где L лч ( ω ) ≥− L э ( ω 03 , a 03 + a ), имеется один положительный и один отрицательный переход фазовой характеристики ψ лч ( ω ) через линию − 180 0 , а в диапазоне частот, где L лч ( ω ) ≥− L э ( ω 03 , a 03 − a ), имеются два положительных и один отрицательный переход фазовой характеристики ψ лч ( ω ) через линию − 180 0 .
В рассмотренной системе при малых по величине возмущениях установятся высокочастотные автоколебания с частотой ω 03 и амплитудой a 03 , а при больших по величине возмущениях − низкочастотные автоколебания с частотой ω 01 и амплитудой a 01 .
6.5. Методы фазового пространства
Методы фазового пространства относятся к наиболее ранним точным аналитическим методам теории нелинейных систем. К ним относится метод фазовой плоскости и метод точечных отображений или преобразований.
Фазовым пространством называется пространство, по осям координат которого отложены переменные, характеризующие состояние динамической системы. Если движение системы описывается дифференциальным уравнением n-го порядка, то состояние этой системы в любой момент времени можно характеризовать некоторой точкой n-мерного фазового пространства, по осям которого отложены одна из координат системы и (n-1) ее производных. Точка, характеризующая состояние системы, называется изображающей точкой.
При движении системы изображающая точка описывает в фазовом пространстве некоторую кривую, называемую фазовой траекторией. Каждому определенному переходному процессу в фазовом пространстве соответствует определенная фазовая траектория. Начальное положение изображающей точки определяется начальными условиями. В установившемся равновесном состоянии системы все производные рассматриваемой переменной равны нулю; соответствующие этому точки фазового пространства находятся в покое и называются особыми точками. Совокупность фазовых траекторий для всевозможных начальных отклонений называется фазовым портретом системы.
Имея фазовый портрет системы, определяют по нему особые точки и траектории, исследуют устойчивость системы и оценивают качество процесса управления.
Метод фазовой плоскости используется для исследования систем второго порядка и заключается в построении фазовых портретов на плоскости. Для этого из уравнений состояния исключается время и определяются уравнения фазовых кривых. Задача становится достаточно простой, если рассматривается система с кусочно-линейной характеристикой нелинейного элемента. В этом случае в разных областях фазовой плоскости система описывается линейными уравнениями, в соответствии с которыми строятся фазовые траектории, которые в дальнейшем “сшиваются” по линиям переключения, определяемым видом нелинейной характеристики.
При исследовании нелинейных систем высокого порядка их аппроксимируют системами второго порядка с эквивалентным запаздыванием.
Для изображения процессов на фазовой плоскости нелинейное уравнение, описывающее систему, заменяют эквивалентными уравнениями первого порядка вида
НЕЛИНЕЙНЫЕ СИСТЕМЫ
Физический энциклопедический словарь. — М.: Советская энциклопедия . Главный редактор А. М. Прохоров . 1983 .
— колебательные (волновые) системы, процессы в к-рых не удовлетворяют суперпозиции принципу, в отличие от линейных систем. Все реальные физ. системы нелинейны, их можно считать линейными лишь приближённо -при малой интенсивности колебат. и волновых процессов. Матем. образом Н. с. являются нелинейные ур-ния (см. Нелинейные уравнения математической физики). Изучением колебат. и волновых процессов в конкретных Н. с. занимаются гидродинамика, нелинейная оптика, нелинейная акустика, физика плазмы (см. Нелинейные явления в плазме), а также химия, биология, экология, социология и др. В то же время многие Н. с. совершенно различной природы имеют одинаковое матем. описание. Соответственно, совпадает и характер протекающих в них процессов. Это послужило основой для развития единого подхода к изучению Н. с., позволило выработать базовые модели, образы и понятия и проанализировать осн. колебат. и волновые явления в Н. с. вне зависимости от их конкретной природы.
Аналитич. описание процессов в Н. с. затруднено ввиду отсутствия общих методов решения нелинейных ур-ний. Наиб. доступно изучение динамики слабонелинейных систем. Описывающие их ур-ния содержат нелинейные члены с малым параметром, что позволяет использовать разл. варианты метода возмущений (см. Возмущений теория). Нелинейность в таких системах проявляется либо в возникновении малых поправок к решению линеаризов. системы ур-ний, получаемой в пренебрежении нелинейными членами, либо, что более важно, в медленном изменении его параметров. При исследовании сильнонелинейных систем, за исключением ограниченного числа точно решаемых случаев, используется численное моделирование.
Разделяют два класса Н. с.- консервативные системы, в к-рых энергия колебательных (волновых) процессов сохраняется, и неконсервативные системы, в к-рых энергия диссипирует ( диссипативиые системы )или поступает в систему от внеш. источников (активные системы). Прогресс в изучении консервативных Н. с. в значит. мере обусловлен возможностью применения к большинству из них аппарата гамильтонова формализма. Во многих практически важных случаях гамильтониан Н. с. совпадает с выражением для энергии системы. Известны, однако, консервативные Н. с., для к-рых га-мильтоново описание не построено. Для биол., эколо-гич., социологич. и т. п. И. с., в к-рых строгое определение консервативности с использованием интеграла энергии не применимо, также принято указанное деление, основанное на аналогии их описания с физ. Н. с.
Консервативные Н. с. Простейшим примером поведения консервативной Н. с. являются колебания нелинейного осциллятора, описываемые ур-нием
Если ф-ция f(x) линейна [f(x)- х], то осциллятор линейный. Ур-ние нелинейного осциллятора описывает, напр., колебания матем. маятника, изменения тока и напряжения в колебат. контуре, в к-ром индуктивность катушки зависит от величины тока и (или) ёмкость конденсатора зависит от напряжения, а также движение иона в пространственно неоднородном электрич. поле и др.

Рис. 1. Потенциал электрического поля j(x) и фазо вые траектории, отвечающие движению иона в дан ном поле при различных значениях энергии .
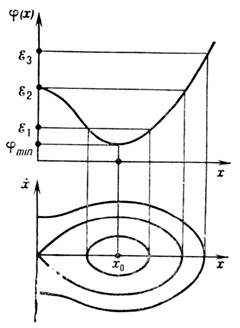

На рис. 1 приведены вид потенциального рельефа j(x) и соответствующие ему фазовые траектории — траектории движения изображающей точки Н. с. в фазовом пространстве ( х,). Энергия заряж. частицы, движущейся в стационарном электрич. поле, сохраняется:

(где т,q — масса и заряд частицы; q > 0). Это выражение определяет гамильтониан осциллятора. Дифференцирование его по времени даёт ур-ние нелинейного осциллятора, где f(x)= q/mj‘ x . Осциллятор является линейным лишь при условии j(x)

х 2 , т. е. при пара-болич. потенциальном рельефе. При этом его колебания являются гармоническими и изохронными — их частота не зависит от амплитуды. Как видно из рис. 1, осциллятор имеет два состояния равновесия ( = 0):
центр (при х = х 0 )и седло (при х =0), первое из них устойчиво (локальный минимум потенц. энергии), второе неустойчиво. Выведенная из состояния покоя при х = х 0 . частица совершает колебания в окрестности этой точки (замкнутые кривые на рис. 1). При малых отклонениях х от х 0 осциллятор является линейным, т. к. j — j мин
( х -x 0 ) 2 при х — х 0 . 0. С ростом энергии осциллятора
0. С ростом энергии осциллятора  фазовая траектория приближается к сепаратрисе. Колебания осциллятора становятся ангармоническими (возникают гармоники осн. частоты), т. к. всё большую часть периода занимают участки медленного движения частицы. Период колебаний возрастает с ростом их амплитуды и на сепаратрисе равен бесконечности (частица приближается к неустойчивому состоянию равновесия с бесконечно малой скоростью бесконечно долго). Т. о., колебания нелинейного осциллятора неизохронны — их период зависит от амплитуды (энергии).
фазовая траектория приближается к сепаратрисе. Колебания осциллятора становятся ангармоническими (возникают гармоники осн. частоты), т. к. всё большую часть периода занимают участки медленного движения частицы. Период колебаний возрастает с ростом их амплитуды и на сепаратрисе равен бесконечности (частица приближается к неустойчивому состоянию равновесия с бесконечно малой скоростью бесконечно долго). Т. о., колебания нелинейного осциллятора неизохронны — их период зависит от амплитуды (энергии).
В отличие от линейных систем, в Н. с. возможно взаимодействие колебаний (или волн) между собой. Такое взаимодействие имеет, напр., место в системе трёх нелинейно связанных осцилляторов, описываемой системой ур-ний

При малом m — это слабонелинейная система. Поведение её близко к суперпозиции квазигармонич. колебаний осцилляторов с медленно меняющимися амплитудами. Благодаря нелинейной связи колебания двух осцилляторов с частотами w 1 . и w 2 порождают в системе колебания с комбинац. частотами w 1 bw 2 . Действие малой нелинейности накапливается, если выполнено условие резонанса частот
Эфф. обмен энергией между осцилляторами происходит, когда возбуждён ВЧ-осциллятор и энергия колебаний передаётся двум НЧ-осцилляторам — т. н. распадная неустойчивость, либо когда возбуждены два НЧ-осциллятора и идёт обратный процесс — слияние НЧ- колебаний. Подобный обмен энергией может быть периодическим (рис. 2). К задаче о взаимодействии нелинейно связанных осцилляторов сводятся во мн. случаях задачи о взаимодействии квазимонохроматич. волн в безграничных Н. с., таких, как линии передачи и волноводы с нелинейными элементами, нелинейные среды и т. п. В Н. с. с дисперсией волн эффективно взаимодействует ограниченное число волн, связанных с условиями резонанса частот и волновых векторов — условиями синхронизма.
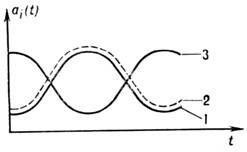
Рис. 2. Изменение амплитуд колебаний трёх вза имодействующих осцилляторов (w 3 > w 1 , w 2 ).
Рис. 3. Дисперсионные зависимости ионно-зву ковых (1 )и ленгмюровских (2) волн в плазме и диаграмма, иллюстрирующая условия синхронизма трёх взаимодействуюших волн.
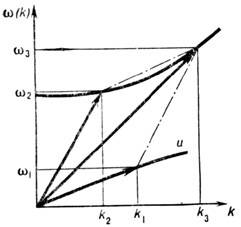
Для случая трёх взаимодействующих волн, напр. ионнозвуковой и ленгмюровских волн в плазме (см. Взаимодействие волн в плазме), они имеют вид (рис. 3):
Как и при взаимодействии нелинейно связанных осцилляторов, здесь возможны распадная неустойчивость и слияние волн.
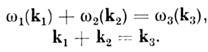
В отсутствие дисперсии волн в Н. с. в синхронизме с исходной квазимонохроматич. волной находятся все её гармоники. Поэтому если исходная волна гармоническая, то она порождает за счёт нелинейности гармоники с кратными частотами и волновыми числами, причём с течением времени возбуждаются всё более высокочастотные гармоники.
Рис. 4. Эволюция профиля исходной гармонической волны в отсутствие дисперсии волн (t 0 <t 1 <t 2 ).
На пространственно-временном языке этот процесс соответствует искажению профиля исходного возмущения (рис. 4) и описывается ур-нием простой волны
к-рое отвечает, в частности, нелинейным акустич. волнам в системе отсчёта, движущейся со скоростью звука малой амплитуды и отражает зависимость скорости распространения возмущения от его интенсивности. Решением его являются простые волны (или Рима-на волны) и = U(t — х/и), вид ф-ции U задаётся нач. возмущением. При и> 0 точки профиля с течением времени сдвигаются в направлении распространения волны, а при и <0 — в противоположном. Профиль волны искажается, и в нек-рый момент времени величина и х становится бесконечной — происходит «опрокидывание» волны. Применимость ур-ния нарушается.
Наличие дисперсии волн в области ВЧ стабилизирует «опрокидывание», т. к. ВЧ-гармоники выходят из синхронизма и практически не возбуждаются. В результате противодействия нелинейности и дисперсии в безграничной Н. с. могут возникать т. н. стационарные волны, распространяющиеся с пост. скоростью без изменения формы профиля: периодич. волны сложной формы и уединённые волны — солитоны.
Наряду с взаимодействием волн в Н. с. важную роль играют эффекты самовоздействия. Если в Н. с. в силу особенностей дисперсионных характеристик условия трёхволнового взаимодействия не выполнены, то наиб. существенным является самовоздействие квазимонохроматич. волны. Оно возникает, напр., при распространении эл.-магн. волны в среде с показателем преломления, зависящим от интенсивности поля. В частности, пучок света в такой среде формирует неоднородное поперёк пучка распределение показателя преломления, подобное линзе, что в свою очередь может приводить к его фокусировке — происходит самофокусировка света. Аналогично возникают самомодуляция квазимонохроматич. волн в направлении их распространения и самосжатие волновых пакетов, приводящее к образованию стационарных волн огибающих нелинейных волновых пакетов, в т. ч. солитонов.
В Н. с. даже в отсутствие случайных воздействий возможны чрезвычайно сложные, нерегулярные коле-бат. и волновые режимы, требующие для своего описания привлечения вероятностных методов, — т. н. стохастические колебания. Такие колебания может совершать, напр., частица в двумерном потенц. поле при нек-рых формах потенц. рельефа. Стохастическим является также взаимодействие квазимонохроматич. волн в нелинейной среде, когда возбуждено много волн и каждая из них участвует во мн. элементарных взаимодействиях, удовлетворяющих условиям синхронизма,- т. н. слабая турбулентность (см. Турбулентность плазмы).
Неконсервативные Н. с. Наиб. простое проявление диссипации в системе — затухание колебат. и волновых процессов. Однако в безграничной Н. с. благодаря диссипации существует режим, отсутствующий в консервативных Н. с.,- ударные волны, в т. ч. стационарные ударные волны, имеющие вид бегущего перепада (скачка) к.-л. физ. параметров, напр. давления в аку-стич. ударной волне. Ударные волны возникают как результат эволюции простых волн: энергия ВЧ-гар-моник, генерируемых за счёт нелинейности, эффективно поглощается и «опрокидывания» волны не происходит.
В прикладном отношении наиб. важны нелинейные эффекты в активных Н. с., в к-рых энергия колебаний может пополняться вследствие неустойчивостей, обусловленных неравновесностью системы. К таким Н. с. относятся прежде всего генераторы колебаний — от лампового до квантовых (мазеров и лазеров), часы — от ходиков до кварцевых и т. п., в к-рых устанавливаются устойчивые незатухающие колебания с периодом и амплитудой, в широких пределах не зависящими от нач. условий,- автоколебания. Простейший генератор автоколебаний — автогенератор на ламповом триоде, в к-ром потери энергии в колебат. контуре компенсируются пополнением её за счёт непериодич. источника (батареи). Поступление энергии в контур в нужной фазе колебаний осуществляется при помощи обратной связи на управляющий электрод лампы. При перестройке параметров Н. с. могут происходить качественные изменения её поведения — бифуркации. Например, колебания в ламповом генераторе возникают при величине обратной связи, большей нек-рого бифуркационного значения.
Как и колебания в консервативных Н. с., колебания в активных Н. с. могут быть не только регулярными, но и стохастическими. Существуют генераторы стоха-стич. автоколебаний — Н. с., в к-рых возможны незатухающие хаотич. колебания со сплошным спектром за счёт энергии нешумовых источников. Самозарождение в Н. с. стохастич. колебаний — один из возможных путей возникновения турбулентности.
В активных колебат. Н. с., в к-рых возможно одно-врем. существование мн. мод (типов) колебаний с разл. частотами, получающих энергию от общего источника, возникает явление конкуренции мод, т. к. связь между модами порождает зависимость нелинейного затухания или усиления каждой из мод от интенсивности других. Конкуренция мод приводит к тому, что в итоге превалирует одна из них и колебания автогенератора происходят на соответствующей ей частоте. Если моды равноправны и связь их взаимна, то устанавливается режим генерации моды, преобладавшей вначале. В таких Н. с., как, напр., лазер, конкуренция мод происходит и во времени, и в пространстве, что приводит, в частности, к установлению в пространственно-симметричном протяжённом автогенераторе несимметричных в пространстве распределений поля с преобладанием одной из встречных волн. Это один из простейших примеров самоорганизации в Н. с.- возникновение пространственного порядка из нач. беспорядка и образование сложных пространственных структур в однородных (протяжённых) неравновесных Н. с. (физ., хим., биологических и т. п.). Примерами самоорганизации в Н. с. являются конвективные ячейки жидкости, подогреваемой снизу, волны горения, волны популяций в экологич. системах, волновые возбуждения в сердечной ткани.
Лит.: Андронов А. А.,Витт А. А., Xайкин С. Э., Теория колебаний, [3 изд.], М., 1981; Горелик Г. С., Колебания и волны, 2 изд., М., 1959; Уизем Д ж., Линейные и нелинейные волны, пер. с англ., М., 1977; Рабинович М. И., Трубецков Д. И., Введение в теорию колебаний и волн, М., 1984. А. Н. Басович.
Физическая энциклопедия. В 5-ти томах. — М.: Советская энциклопедия . Главный редактор А. М. Прохоров . 1988 .