Лекция 1. Электромеханические системы
Терминология, определения. Если исполнительными механизмами системы являются электромеханизмы, а система автоматически выполняет автономные режимы, связанные с работой одного или более механизмов, то такая система называется электромеханической. Класс электромеханических систем (ЭМС) достаточно широк, с их помощью решаются задачи автоматического управления, стабилизации или программного управления.
Как показывает практика, исполнительные механизмы и агрегаты ЭМС достигли своего совершенства. Так, например, системы стыковки космических аппаратов (КА) [1], [2] обеспечивают с помощью стыковочного узла жесткое соединение электрических и гидравлических разъёмов, а также герметичный стык между двумя КА. Такие ювелирные задачи по точной механике обеспечиваются конструкцией исполнительных механизмов и авионикой. Опыт отечественной и зарубежной космонавтики показал, что наибольшее распространение получил стыковочный узел типа «штырь-конус». На одном КА размещается активный стыковочный агрегат (АСА) типа «штырь», на другом – пассивный стыковочный агрегат (ПСА) типа «конус».
Стыковочный узел и его эволюция. Назначением стыковочного узла является соединение двух КА в единое целое и их расстыковка на монтажной орбите. Эту задачу выполняет стыковочный механизм (СтМ) АСА, защёлки головки которого механически соединяются с гнездом приёмного конуса ПСА. При этом усилие стягивания СтМ двух КА составляет порядка 1,5 т. При расстыковке агрегат АСА должен растолкнуть КА с требуемыми параметрами, при этом усилие обеспечивается пружиной СтМ, которая взводится при выдвижении штанги. Для обеспечения высокой надёжности расстыковки КА в состав СтМ были введены пироболты (ПБ) отстрела стыковочного механизма. В случае необходимости переход экипажа из одного КА в другой осуществляется по наружной поверхности космических аппаратов и требует наличия шлюзовых камер для выхода и входа космонавта. Для более комфортного перехода космонавта каждый из стыковочных агрегатов стал оснащаться крышкой переходного люка (ПЛ), которая открывается/закрывается, разгерметизируется/герметизируется вручную или автоматически. Эти операции усложнили режим стыковки за счет введения процедур освобождения защелок и втягивания штанги.
Наличие крышки ПЛ потребовало введения механизма герметизации стыка (МГС), который размещается на стыковочном шпангоуте каждого агрегата. При этом усилие стягивания двух КА возросло до 20 т. При расстыковке достаточно открыть крюки МГС, а рассталкивание КА обеспечивается толкателями, устанавливаемые по два на каждом стыковочном шпангоуте. На этом этапе введены ПБ открытия активных и пассивных крюков.
Если для первых КА достаточным была работа МГС одного агрегата АСА, то при увеличении масс стыкуемых КА и усложнении конфигурации станций потребовалась одновременная работа замком двух стыковочных агрегатов. В дальнейшем для обеспечения надежности было увеличено число замков, а в состав принадлежностей стыковочного агрегата были введены ручные зажимы для стяжки стыка. Кроме того, в СтМ были введены управляемые электромагнитные тормоза (ЭМТ), осуществляющие интенсивное демпфирование соударения стыковочных агрегатов.
С увеличением задач сборки количество агрегатов ПСА на станции возросло до шести. С учётом требований эксплуатации был увеличен просвет переходного люка.
Эволюция системы стыковки. Автоматическая система стыковки (АСС) проектировалась для беспилотных КА. Для проведения стыковки и расстыковки в ограниченной зоне радиовидимости в систему АСС был введен временной контроль выполнения каждого режима, который осуществлялся автономным программно-временным устройством (ПВУ). В нештатной ситуации (НШС) любой режим прерывался меткой ПВУ для проведения ана-
Электромеханическая система как объект автоматического управления
Электромеханические системы занимают центральное место в подавляющем большинстве технических систем. Основная определяющая их функция — преобразование электрической энергии в управляемую механическую. Т.е. они обеспечивают возможность регулирования параметров механического движения объектов управления (скорость, ускорение, угловое или линейное перемещение, сила, момент и др.). Как правило, данная функция должна выполняться автоматически.
В промышленности, науке, в быту используются разнообразные машины, механизмы и устройства, которые облегчают деятельность человека, повышают производительность и качество, уровень безопасности и комфортности и т.д. Приведем несколько примеров:
в промышленности — приводы станков, бумагоделательных машин, подъемно-транспортного оборудования и др.
в научных исследованиях — приводы и следящие системы телескопов, системы пространственного управления лазерным излучением, прецизионные микроподвижки и т.д.
в быту — кондиционеры, пылесосы, стиральные и посудомоечные машины.
В данном курсе студенты должны познакомиться с основными типами электромеханических систем и устройств и входящими в их состав элементами, изучить принцип действия и их основные характеристики, получить необходимые знания и практические навыки по расчету и выбору исполнительных устройств, по способам управления ими и их математическому моделированию.
Все технические средства автоматики можно представить в виде иерархической структуры, состоящей из трех уровней:
1. Системы управления и автоматического регулирования (высший уровень).
2. Автоматические регуляторы, следящие приводы и подсистемы (средний уровень).
3. Элементы и устройства подсистем, регуляторов, приводов и систем автоматического управления (нижний уровень).
Предметом изучения данного курса является нижний — базовый
уровень элементной базы систем автоматического управления.
В настоящее время разрабатывается и выпускается огромное разнообразие электромеханических устройств и элементов, выполняющих одни и те же функции, но отличающихся по принципу действия, конструктивному исполнению, способам управления и т.д.
Будущим специалистам по разработке и эксплуатации систем автоматического управления необходимо не только хорошо знать элементную базу, но и уметь выбирать из нее самые рациональные варианты решений с учетом условий работы и предъявляемым техническим требованиям.
Рассмотрим два классических примера автоматических электромеханических систем.
Следящая система «угол-угол». Обеспечивает автоматическую отработку угла поворота объекта управления (антенна радиолокационной станции, видеокамера) по заданию оператора. Функциональная схема такой системы приведена на Рисунок1.
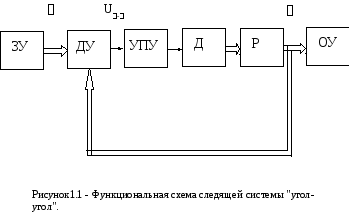
Система работает следующим образом. Оператор с помощью
задающего устройства (ЗУ) вводит угол , на который нужно повернуть объект управления (ОУ). ЗУ поворачивает на заданный угол входную ось датчика угла рассогласования (ДУ), который может быть реализован, например, на сельсинах или поворотных трансформаторах (один механически связан с задающим устройством, а второй с осью вращения объекта управления, а между собой они связаны электрически). В первый момент угол поворота ОУ отличается от угла задания . На выходе ДУ возникает напряжение U—, пропорциональное разности этих двух углов, которое подается на вход уcилительно-преобразовательного устройства (УПУ). УПУ выполняется обычно на полупроводниковых и интегральных элементах, его состав и структура определяются выбором типа исполнительного двигателя (Д). В конечном итоге УПУ должно обеспечить усиление сигнала рассогласования по мощности, достаточной для управления двигателем.
Под действием сигнала рассогласования двигатель начинает вращаться.
Начинает вращаться и объект управления, который механически связан через понижающий редуктор (Р) с валом двигателя. При этом разность углов и уменьшается, а в момент, когда она будет равна нулю, происходит остановка двигателя, так как U— тоже будет равно нулю. Таким образом, ОУ повернется на заданный угол .
Следящая система «угол-угол» по своему функциональному назначению и составу элементов является характерным примером электромеханических систем автоматического управления.
Другим примером может быть система автоматической стабилизации скорости вращения электродвигателя, широко используемая в том или ином исполнении во многих сложных технических устройствах. Функциональная схема системы стабилизации скорости приведена на рисунке 1.2.

Система стабилизации предназначена для поддержания заданной скорости вращения двигателя вне зависимости от изменений нагрузки (момента нагрузки на валу двигателя) и других внешних возмущающих факторов. В отличие от первого примера, в данной системе реализуется отрицательная обратная связь по скорости вращения двигателя. Для этой цели служит тахогенератор (ТГ), представляющий собой электромашинный преобразователь скорости вращения в пропорциональное ей электрическое напряжение. ТГ располагается на одной оси с двигателем (целый ряд современных двигателей содержат встроенный тахогенератор), а двигатель через редуктор связан с исполнительным органом (ИО), который необходимо вращать с постоянной заданной скоростью. Как и в первом примере здесь реализован принцип регулирования по отклонению. При отклонении скорости вращения ИО от заданной, в силу указанных выше причин, УПУ формирует сигнал рассогласования и подает его на управление двигателем, который изменяет скорость вращения, сводя это рассогласование к минимальному значению.
Анализируя состав и структуру рассмотренных систем можно увидеть в них много общего и сделать вывод о наличии некоторого базового комплекса элементов и устройств присущего электромеханическим системам. Этот комплекс называется — электроприводом. В его состав могут входить электромашинные устройства различного назначения (двигатели, преобразователи, генераторы и т.д.), электронные устройства (усилители, широтно-импульсные преобразователи, модуляторы и демодуляторы и т.д.) и
механические преобразовательные устройства (редукторы, винтовые и червячные передачи и др.).
Современный электропривод является индивидуальным автоматизированным электроприводом. Он включает в себя систему автоматического управления (САУ), которая в простейшем случае осуществляет пуск и останов электродвигателя, а в более сложных случаях управляет технологическим процессом приводимого в движение исполнительного механизма.
Мощность автоматизированного электропривода охватывает диапазон от нескольких долей ватта до десятков тысяч киловатт.
Автоматизированный электропривод делится на управляемый и неуправляемый, постоянного, переменного тока, транзисторный и тиристорный. До недавнего времени в качестве регулируемого электропривода применялся электропривод постоянного тока. В последние годы значительные успехи в силовой преобразовательной технике привели к созданию надежных регулируемых транзисторных и тиристорных электроприводов переменного тока. Так как двигатели переменного тока имеют неоспоримые преимущества перед двигателями постоянного тока (они значительно дешевле, надежнее, имеют лучшие массогабаритные показатели и относительно простую конструкцию) в ближайшие годы ожидается бурное развитие управляемого электропривода переменного тока. Этому способствует широкое внедрение в управляемый электропривод микропроцессорной техники.
Стремление к упрощению кинематических цепей машин и механизмов привело к созданию безредукторных электроприводов, которые по сравнению с редукторными обладают большей надежностью и быстродействием, технологичнее в изготовлении. Предельно упрощает кинематику машин применение управляемого электропривода на базе линейных электрических машин постоянного и переменного тока. При этом создаются максимальные удобства для оптимального конструирования машин с поступательным движением рабочих органов.
Приведем обобщенную функциональную схему электропривода, которая содержит все возможные устройства и поясняет их взаимодействие и взаимовлияние. Обобщенная функциональная схема электропривода приведена на рисунке 2.1, где ИЭ — источник энергии (промышленная электросеть, электромашинный генератор, аккумулятор), ЭПУ — электрическое преобразовательное устройство (управляемый выпрямитель, широтно-импульсный преобразователь, электронный или электромашинный усилитель), ДУ — двигательное устройство (электродвигатель, пьезоэлектрический или магнитострикционный двигатель, электромагнитный двигатель),

МПУ-механическое преобразовательное устройство (редуктор, шарико-винтовая или червячная передача, кинематическая передача), ИО- исполнительный орган рабочей машины (турбина, вентилятор, оптические элементы приборов), УУ- устройство управления
(микропроцессор, управляющая ЭВМ), ЗУ — задающее устройство (ЭВМ, аналоговое устройство), ДПИ — датчики преобразователи информации (тахогенератор, термопара, индуктивные и емкостные датчики), сплошными одинарными стрелками обозначены аналоговые электрические сигналы постоянного иди переменного тока, пунктирные стрелки обозначают сигналы, наличие которых или отсутствие, а также форма определяются условиями конкретной технической системы, двойные стрелки обозначают механические связи.
Функции, выполняемые устройствами, входящими в состав электропривода:
ИЭ -обеспечение электропитанием всех элементов и устройств электропривода;
ЭПУ- преобразует сигнал управления в форму требуемую данным двигательным устройством;
ДУ — преобразует электрическую энергию в механическую;
МПУ — обеспечивает изменение параметров вырабатываемой ДУ механической энергии;
ИО — выполняет заданные функции;
УУ-вырабатывает сигнал управления в функции задающего сигнала и различных дополнительных электрических сигналов, содержащих информацию о процессе преобразования энергии, реальных параметрах механического движения ДУ и ИО, кроме того, обеспечивает защиту и блокировку всех электромеханических устройств, входящих в составу электропривода.
ЗУ — формирует сигнал задания на УУ.
ДПИ — датчики-преобразователи информации служат для измерения различных координат электропривода (скорость вращения, ток, угол поворота и др.) и преобразования их в электрические сигналы одинакового вида.
Основными элементами электропривода являются электрические машины, которые могут выполнять функции двигательных устройств, источников энергии, датчиков преобразователей информации.
Большая Энциклопедия Нефти и Газа
Электромеханические системы управления бывают двух типов: разомкнутые и замкнутые. Система разомкнутого типа — это электрические и механические устройства, соединенные между собой, образующие законченную систему, предназначенную для выполнения определенной функции при подаче соответствующей команды. [2]
Электромеханическая система управления имеет свою электрическую схему. [3]
Электромеханическая система управления имеет свою электрическую схему. Электрическая схема делится на цепи главного тока ( силовые) и цепи управления. [4]
Рассмотренная электромеханическая система управления позволяет фрезерному станку обрабатывать по копиру заготовки сложной конфигурации со скоростью до 375 мм / мин. Величина скорости копирования, зависящая от быстродействия следящей системы, ограничивается недостаточно эффективной обратной связью и малым коэффициентом электронного усилителя. [5]
Полуавтоматический гравировально-токар-ный станок со следящей электромеханической системой управления был построен в 1901 г. французом Аврилем. [6]
В качестве дистанционных используют чаще всего гидравлические, электрогидравлические и электромеханические системы управления . [8]
Фрезерные и токарные станки оснащаются также электромеханическими системами управления . [10]
На рис. 2.13 ( 3) изображена разомкнутая электромеханическая система управления . Генератор, якорь которого вращается с постоянной скоростью, вырабатывает напряжение, поступающее на обмотку возбуждения двигателя. Двигатель обладает моментом инерции Jm и коэффициентом трения Ът. [11]
Регулятор этого типа надежен в работе, но сравнительно громоздок, имеет довольно сложную электромеханическую систему управления , обладает значительной инерционностью и поэтому не позволяет осуществлять регулирование с произвольной скоростью. Кроме того, он требует постоянного надзора за трущимися частями и контактами реле управления. [13]
Так, например, успешно эксплуатируется струйная система управления прессованием абразивных кругов. Система работает в условиях чрезвычайной загрязненности воздуха абразивной пылью, что резко снижает надежность электронных и электромеханических систем управления . [14]
В этом реакторе в качестве ядерного горючего используется слабообогащенная двуокись урана-235 и образующийся в процессе работы реактора плутоний. Основными конструктивными элементами реактора ВВЭР являются: корпус высокого давления, внутри-корпусные устройства, верхний блок с электромеханической системой управления и защиты реактора. Активная зона состоит из 349 топливных кассет, размещенных в выемной корзине. В корпусе реактора поддерживается рабочее давление теплоносителя — замедлителя воды, равное 125 атм. [15]
Система автоматического управления электромеханическим объектом
Принципы построения и свойства систем автоматического управления. Анализ системы с астатизмом нулевого порядка. Подача на двигатель возмущения по моменту. Исследование САУ угловым положением механической нагрузки, включающей пропорциональный регулятор.
| Рубрика | Коммуникации, связь, цифровые приборы и радиоэлектроника |
| Вид | лабораторная работа |
| Язык | русский |
| Дата добавления | 24.02.2015 |
| Размер файла | 614,6 K |
Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru
Размещено на http://www.allbest.ru
Цель работы: Исследование принципов построения и свойств систем автоматического управления
Схема 1.1 — Структурная схема
Структурная схема ЭМО:
Момент инерции, приведенный к валу двигателя:
Коэффициенты передачи упрощенной модели:
Механическая постоянная времени:
Исследование системы с астатизмом нулевого порядка
Схема 1.1 — Схема моделирования САУ скоростью механической нагрузки, включающая пропорциональный регулятор и объект управления.
Граница устойчивости при К=8.5
При К=1t= 0.171e(уст)=0.645
График 1.1 — Скорость нагрузки
График 1.2 — Ошибка
График 1.3 — Скорость нагрузки
График 1.4 — Ошибка
При К=0.5 t= 0.16e(уст)=1.15
График 1.5 — Скорость нагрузки
График 1.6 — Ошибка
Подача на двигатель возмущения по моменту.
График 2.1 — Ошибка при К=6 M=0 (t=0.66; e(уст)=0.11)
График 2.2 — Ошибка при К=6 M=50 (t=0.6; e(уст)=0.65)
Подача на вход САУ линейно возрастающего воздействия
График 3.1 — Скорость нагрузки при K=6 и линейно возрастающем сигнале от 0 В до 50 В.
График 3.2 — Ошибка при K=6 и линейно возрастающем сигнале от 0 В до 10 В.
Исследование системы с астатизмом первого порядка
Схема 4.1 — Схема моделирования САУ скоростью механической нагрузки с пропорционально-интегральным регулятором и объектом управления.
Граница устойчивости при К = 7.5
При К=0.5 t=0.11e(уст)=0
График 4.1 — Скорость нагрузки
График 4.2 — Ошибка
При К=1 t=0.1e(уст)=0
График 4.3 — Скорость нагрузки
График 4.4 — Ошибка
При К=6 t=0.35e(уст)=0
График 4.5 — Скорость нагрузки
Подача на двигатель возмущения по моменту.
График 5.1 — Ошибка при К=6 M=0 (t=0.35; e(уст)=0)
График 5.2 — Ошибка при К=6 M=100 (t=0.25; e(уст)=0)
Подача на вход САУ линейно возрастающего воздействия
График 6.1 — Скорость нагрузки при K=0.5 и линейно возрастающем сигнале от 0 В до 100 В.
График 6.2 — Ошибка при K=0.5 и линейно возрастающем сигнале от 0 В до 100 В.
График 6.3 — Скорость нагрузки при K=6 и линейно возрастающем сигнале от 0 В до 100 В.
График 6.4 — Ошибка при K=6 и линейно возрастающем сигнале от 0 В до 100 В
График 6.5 — Скорость нагрузки при K=0.5 и линейно возрастающем сигнале от 0 В до 200 В.
График 6.6 — Ошибка при K=0.5 и линейно возрастающем сигнале от 0 В до 200 В.
График 6.7 — Скорость нагрузки при K=6 и линейно возрастающем сигнале от 0 В до 200 В.
График 6.8 — Ошибка при K=6 и линейно возрастающем сигнале от 0 В до 200 В
Исследование САУ угловым положением механической нагрузки, включающей пропорциональный регулятор и ОУ
автоматический управление регулятор нагрузка
Схема 7 -Схема моделирования САУ угловым положением механической нагрузки с пропорциональным регулятором и ОУ
Граница устойчивости при К = 134
График 7.1 — Скорость нагрузки
График 7.3 — Скорость нагрузки
График 7.4 — Ошибка
График 7.5 — Скорость нагрузки
График 7.6 — Ошибка
Временные диаграммы при движении с постоянной скоростью и постоянным ускорением.
График 8.1 -Временная диаграмма при движении с постоянной скоростью при K=10
График 8.2 — Временная диаграмма при движении с постоянным ускорениемK=10
САУ с пропорциональным регулятором:
Значение коэффициента пропорционального регулятора оказывает значительное влияние на вид переходного процесса. При увеличении коэффициента увеличивается длительность переходного процесса, а также установившееся значение скорости вала, и уменьшается установившееся значение ошибки.
При увеличении момента нагрузки установившееся значение ошибки уменьшается.
САУ с пропорционально- интегральным регулятором:
Значение коэффициента пропорционального регулятора оказывает значительное влияние на вид переходного процесса.При увеличении коэффициента увеличивается длительность переходного процесса, установившееся значение скорости вала и установившееся значение ошибки не изменяются.
При изменении момента нагрузки установившееся значение ошибки не изменяется.
При подаче линейно изменяющегося входного сигнала:
При увеличении коэффициента пропорционального регулятора установившееся значение ошибки уменьшается. При уменьшении скорости изменения входного сигнала установившееся значение ошибки также уменьшается.
Размещено на Allbest.ru
Подобные документы
Исследование режимов системы автоматического управления. Определение передаточной функции замкнутой системы. Построение логарифмических амплитудной и фазовой частотных характеристик. Синтез системы «объект-регулятор», расчет оптимальных параметров.
курсовая работа [1,4 M], добавлен 17.06.2011
Структура замкнутой линейной непрерывной системы автоматического управления. Анализ передаточной функции системы с обратной связью. Исследование линейной импульсной, линейной непрерывной и нелинейной непрерывной систем автоматического управления.
контрольная работа [1,6 M], добавлен 16.01.2011
Передаточная функция, блок-схема системы управления, состоящей из последовательно соединенных регулятора и объекта. Определение коэффициентов усиления. Параметры системы при различных регуляторах. Расчет электрической схемы с учетом разрешенных элементов.
лабораторная работа [290,1 K], добавлен 12.07.2013
Общие принципы построения систем автоматического управления, основные показатели их качества. Передаточная функция разомкнутой и замкнутой систем. Определение устойчивости системы. Оценка точности отработки заданных входных и возмущающих воздействий.
реферат [906,1 K], добавлен 10.01.2016
Работа регулятора линейного типа, автоматического регулятора, исполнительного механизма, усилителя мощности, нормирующего преобразователя. Составление алгоритмической структурной схемы системы автоматического управления. Критерий устойчивости Гурвица.
Лекция 1. Электромеханические системы
Терминология, определения. Если исполнительными механизмами системы являются электромеханизмы, а система автоматически выполняет автономные режимы, связанные с работой одного или более механизмов, то такая система называется электромеханической. Класс электромеханических систем (ЭМС) достаточно широк, с их помощью решаются задачи автоматического управления, стабилизации или программного управления.
Как показывает практика, исполнительные механизмы и агрегаты ЭМС достигли своего совершенства. Так, например, системы стыковки космических аппаратов (КА) [1], [2] обеспечивают с помощью стыковочного узла жесткое соединение электрических и гидравлических разъёмов, а также герметичный стык между двумя КА. Такие ювелирные задачи по точной механике обеспечиваются конструкцией исполнительных механизмов и авионикой. Опыт отечественной и зарубежной космонавтики показал, что наибольшее распространение получил стыковочный узел типа «штырь-конус». На одном КА размещается активный стыковочный агрегат (АСА) типа «штырь», на другом – пассивный стыковочный агрегат (ПСА) типа «конус».
Стыковочный узел и его эволюция. Назначением стыковочного узла является соединение двух КА в единое целое и их расстыковка на монтажной орбите. Эту задачу выполняет стыковочный механизм (СтМ) АСА, защёлки головки которого механически соединяются с гнездом приёмного конуса ПСА. При этом усилие стягивания СтМ двух КА составляет порядка 1,5 т. При расстыковке агрегат АСА должен растолкнуть КА с требуемыми параметрами, при этом усилие обеспечивается пружиной СтМ, которая взводится при выдвижении штанги. Для обеспечения высокой надёжности расстыковки КА в состав СтМ были введены пироболты (ПБ) отстрела стыковочного механизма. В случае необходимости переход экипажа из одного КА в другой осуществляется по наружной поверхности космических аппаратов и требует наличия шлюзовых камер для выхода и входа космонавта. Для более комфортного перехода космонавта каждый из стыковочных агрегатов стал оснащаться крышкой переходного люка (ПЛ), которая открывается/закрывается, разгерметизируется/герметизируется вручную или автоматически. Эти операции усложнили режим стыковки за счет введения процедур освобождения защелок и втягивания штанги.
Наличие крышки ПЛ потребовало введения механизма герметизации стыка (МГС), который размещается на стыковочном шпангоуте каждого агрегата. При этом усилие стягивания двух КА возросло до 20 т. При расстыковке достаточно открыть крюки МГС, а рассталкивание КА обеспечивается толкателями, устанавливаемые по два на каждом стыковочном шпангоуте. На этом этапе введены ПБ открытия активных и пассивных крюков.
Если для первых КА достаточным была работа МГС одного агрегата АСА, то при увеличении масс стыкуемых КА и усложнении конфигурации станций потребовалась одновременная работа замком двух стыковочных агрегатов. В дальнейшем для обеспечения надежности было увеличено число замков, а в состав принадлежностей стыковочного агрегата были введены ручные зажимы для стяжки стыка. Кроме того, в СтМ были введены управляемые электромагнитные тормоза (ЭМТ), осуществляющие интенсивное демпфирование соударения стыковочных агрегатов.
С увеличением задач сборки количество агрегатов ПСА на станции возросло до шести. С учётом требований эксплуатации был увеличен просвет переходного люка.
Эволюция системы стыковки. Автоматическая система стыковки (АСС) проектировалась для беспилотных КА. Для проведения стыковки и расстыковки в ограниченной зоне радиовидимости в систему АСС был введен временной контроль выполнения каждого режима, который осуществлялся автономным программно-временным устройством (ПВУ). В нештатной ситуации (НШС) любой режим прерывался меткой ПВУ для проведения ана-
1 Электромеханические системы и устройства
Электромеханические системы занимают центральное место в подавляющем большинстве технических систем. Основная определяющая их функция — преобразование электрической энергии в управляемую механическую. Т.е. они обеспечивают возможность регулирования параметров механического движения объектов управления (скорость, ускорение, угловое или линейное перемещение, сила, момент и др.). Как правило, данная функция должна выполняться автоматически.
В промышленности, науке, в быту используются разнообразные машины, механизмы и устройства, которые облегчают деятельность человека, повышают производительность и качество, уровень безопасности и комфортности и т.д. Приведем несколько примеров:
в промышленности — приводы станков, бумагоделательных машин, подъемно-транспортного оборудования и др.
в научных исследованиях — приводы и следящие системы телескопов, системы пространственного управления лазерным излучением, прецизионные микроподвижки и т.д.
в быту — кондиционеры, пылесосы, стиральные и посудомоечные машины.
В данном курсе студенты должны познакомиться с основными типами электромеханических систем и устройств и входящими в их состав элементами, изучить принцип действия и их основные характеристики, получить необходимые знания и практические навыки по расчету и выбору исполнительных устройств, по способам управления ими и их математическому моделированию.
Все технические средства автоматики можно представить в виде иерархической структуры, состоящей из трех уровней:
1. Системы управления и автоматического регулирования (высший уровень).
2. Автоматические регуляторы, следящие приводы и подсистемы (средний уровень).
3. Элементы и устройства подсистем, регуляторов, приводов и систем автоматического управления (нижний уровень).
Предметом изучения данного курса является нижний — базовый
уровень элементной базы систем автоматического управления.
В настоящее время разрабатывается и выпускается огромное разнообразие электромеханических устройств и элементов, выполняющих одни и те же функции, но отличающихся по принципу действия, конструктивному исполнению, способам управления и т.д.
Будущим специалистам по разработке и эксплуатации систем автоматического управления необходимо не только хорошо знать элементную базу, но и уметь выбирать из нее самые рациональные варианты решений с учетом условий работы и предъявляемым техническим требованиям.
Рассмотрим два классических примера автоматических электромеханических систем.
Следящая система «угол-угол». Обеспечивает автоматическую отработку угла поворота объекта управления (антенна радиолокационной станции, видеокамера) по заданию оператора. Функциональная схема такой системы приведена на Рисунок1.
Система работает следующим образом. Оператор с помощью
задающего устройства (ЗУ) вводит угол , на который нужно повернуть объект управления (ОУ). ЗУ поворачивает на заданный угол входную ось датчика угла рассогласования (ДУ), который может быть реализован, например, на сельсинах или поворотных трансформаторах (один механически связан с задающим устройством, а второй с осью вращения объекта управления, а между собой они связаны электрически). В первый момент угол поворота ОУ отличается от угла задания . На выходе ДУ возникает напряжение U—, пропорциональное разности этих двух углов, которое подается на вход уcилительно-преобразовательного устройства (УПУ). УПУ выполняется обычно на полупроводниковых и интегральных элементах, его состав и структура определяются выбором типа исполнительного двигателя (Д). В конечном итоге УПУ должно обеспечить усиление сигнала рассогласования по мощности, достаточной для управления двигателем.
Под действием сигнала рассогласования двигатель начинает вращаться.
Начинает вращаться и объект управления, который механически связан через понижающий редуктор (Р) с валом двигателя. При этом разность углов и уменьшается, а в момент, когда она будет равна нулю, происходит остановка двигателя, так как U— тоже будет равно нулю. Таким образом, ОУ повернется на заданный угол .
Следящая система «угол-угол» по своему функциональному назначению и составу элементов является характерным примером электромеханических систем автоматического управления.
Другим примером может быть система автоматической стабилизации скорости вращения электродвигателя, широко используемая в том или ином исполнении во многих сложных технических устройствах. Функциональная схема системы стабилизации скорости приведена на рисунке 1.2.
Система стабилизации предназначена для поддержания заданной скорости вращения двигателя вне зависимости от изменений нагрузки (момента нагрузки на валу двигателя) и других внешних возмущающих факторов. В отличие от первого примера, в данной системе реализуется отрицательная обратная связь по скорости вращения двигателя. Для этой цели служит тахогенератор (ТГ), представляющий собой электромашинный преобразователь скорости вращения в пропорциональное ей электрическое напряжение. ТГ располагается на одной оси с двигателем (целый ряд современных двигателей содержат встроенный тахогенератор), а двигатель через редуктор связан с исполнительным органом (ИО), который необходимо вращать с постоянной заданной скоростью. Как и в первом примере здесь реализован принцип регулирования по отклонению. При отклонении скорости вращения ИО от заданной, в силу указанных выше причин, УПУ формирует сигнал рассогласования и подает его на управление двигателем, который изменяет скорость вращения, сводя это рассогласование к минимальному значению.
Анализируя состав и структуру рассмотренных систем можно увидеть в них много общего и сделать вывод о наличии некоторого базового комплекса элементов и устройств присущего электромеханическим системам. Этот комплекс называется — электроприводом. В его состав могут входить электромашинные устройства различного назначения (двигатели, преобразователи, генераторы и т.д.), электронные устройства (усилители, широтно-импульсные преобразователи, модуляторы и демодуляторы и т.д.) и
механические преобразовательные устройства (редукторы, винтовые и червячные передачи и др.).
Современный электропривод является индивидуальным автоматизированным электроприводом. Он включает в себя систему автоматического управления (САУ), которая в простейшем случае осуществляет пуск и останов электродвигателя, а в более сложных случаях управляет технологическим процессом приводимого в движение исполнительного механизма.
Мощность автоматизированного электропривода охватывает диапазон от нескольких долей ватта до десятков тысяч киловатт.
Автоматизированный электропривод делится на управляемый и неуправляемый, постоянного, переменного тока, транзисторный и тиристорный. До недавнего времени в качестве регулируемого электропривода применялся электропривод постоянного тока. В последние годы значительные успехи в силовой преобразовательной технике привели к созданию надежных регулируемых транзисторных и тиристорных электроприводов переменного тока. Так как двигатели переменного тока имеют неоспоримые преимущества перед двигателями постоянного тока (они значительно дешевле, надежнее, имеют лучшие массогабаритные показатели и относительно простую конструкцию) в ближайшие годы ожидается бурное развитие управляемого электропривода переменного тока. Этому способствует широкое внедрение в управляемый электропривод микропроцессорной техники.
Стремление к упрощению кинематических цепей машин и механизмов привело к созданию безредукторных электроприводов, которые по сравнению с редукторными обладают большей надежностью и быстродействием, технологичнее в изготовлении. Предельно упрощает кинематику машин применение управляемого электропривода на базе линейных электрических машин постоянного и переменного тока. При этом создаются максимальные удобства для оптимального конструирования машин с поступательным движением рабочих органов.
Приведем обобщенную функциональную схему электропривода, которая содержит все возможные устройства и поясняет их взаимодействие и взаимовлияние. Обобщенная функциональная схема электропривода приведена на рисунке 2.1, где ИЭ — источник энергии (промышленная электросеть, электромашинный генератор, аккумулятор), ЭПУ — электрическое преобразовательное устройство (управляемый выпрямитель, широтно-импульсный преобразователь, электронный или электромашинный усилитель), ДУ — двигательное устройство (электродвигатель, пьезоэлектрический или магнитострикционный двигатель, электромагнитный двигатель),
МПУ-механическое преобразовательное устройство (редуктор, шарико-винтовая или червячная передача, кинематическая передача), ИО- исполнительный орган рабочей машины (турбина, вентилятор, оптические элементы приборов), УУ- устройство управления
(микропроцессор, управляющая ЭВМ), ЗУ — задающее устройство (ЭВМ, аналоговое устройство), ДПИ — датчики преобразователи информации (тахогенератор, термопара, индуктивные и емкостные датчики), сплошными одинарными стрелками обозначены аналоговые электрические сигналы постоянного иди переменного тока, пунктирные стрелки обозначают сигналы, наличие которых или отсутствие, а также форма определяются условиями конкретной технической системы, двойные стрелки обозначают механические связи.
Функции, выполняемые устройствами, входящими в состав электропривода:
ИЭ -обеспечение электропитанием всех элементов и устройств электропривода;
ЭПУ- преобразует сигнал управления в форму требуемую данным двигательным устройством;
ДУ — преобразует электрическую энергию в механическую;
МПУ — обеспечивает изменение параметров вырабатываемой ДУ механической энергии;
ИО — выполняет заданные функции;
УУ-вырабатывает сигнал управления в функции задающего сигнала и различных дополнительных электрических сигналов, содержащих информацию о процессе преобразования энергии, реальных параметрах механического движения ДУ и ИО, кроме того, обеспечивает защиту и блокировку всех электромеханических устройств, входящих в составу электропривода.
ЗУ — формирует сигнал задания на УУ.
ДПИ — датчики-преобразователи информации служат для измерения различных координат электропривода (скорость вращения, ток, угол поворота и др.) и преобразования их в электрические сигналы одинакового вида.
Основными элементами электропривода являются электрические машины, которые могут выполнять функции двигательных устройств, источников энергии, датчиков преобразователей информации.
Электромеханическая система как объект автоматического управления
Электромеханические системы занимают центральное место в подавляющем большинстве технических систем. Основная определяющая их функция — преобразование электрической энергии в управляемую механическую. Т.е. они обеспечивают возможность регулирования параметров механического движения объектов управления (скорость, ускорение, угловое или линейное перемещение, сила, момент и др.). Как правило, данная функция должна выполняться автоматически.
В промышленности, науке, в быту используются разнообразные машины, механизмы и устройства, которые облегчают деятельность человека, повышают производительность и качество, уровень безопасности и комфортности и т.д. Приведем несколько примеров:
в промышленности — приводы станков, бумагоделательных машин, подъемно-транспортного оборудования и др.
в научных исследованиях — приводы и следящие системы телескопов, системы пространственного управления лазерным излучением, прецизионные микроподвижки и т.д.
в быту — кондиционеры, пылесосы, стиральные и посудомоечные машины.
В данном курсе студенты должны познакомиться с основными типами электромеханических систем и устройств и входящими в их состав элементами, изучить принцип действия и их основные характеристики, получить необходимые знания и практические навыки по расчету и выбору исполнительных устройств, по способам управления ими и их математическому моделированию.
Все технические средства автоматики можно представить в виде иерархической структуры, состоящей из трех уровней:
1. Системы управления и автоматического регулирования (высший уровень).
2. Автоматические регуляторы, следящие приводы и подсистемы (средний уровень).
3. Элементы и устройства подсистем, регуляторов, приводов и систем автоматического управления (нижний уровень).
Предметом изучения данного курса является нижний — базовый
уровень элементной базы систем автоматического управления.
В настоящее время разрабатывается и выпускается огромное разнообразие электромеханических устройств и элементов, выполняющих одни и те же функции, но отличающихся по принципу действия, конструктивному исполнению, способам управления и т.д.
Будущим специалистам по разработке и эксплуатации систем автоматического управления необходимо не только хорошо знать элементную базу, но и уметь выбирать из нее самые рациональные варианты решений с учетом условий работы и предъявляемым техническим требованиям.
Рассмотрим два классических примера автоматических электромеханических систем.
Следящая система «угол-угол». Обеспечивает автоматическую отработку угла поворота объекта управления (антенна радиолокационной станции, видеокамера) по заданию оператора. Функциональная схема такой системы приведена на Рисунок1.
Система работает следующим образом. Оператор с помощью
задающего устройства (ЗУ) вводит угол , на который нужно повернуть объект управления (ОУ). ЗУ поворачивает на заданный угол входную ось датчика угла рассогласования (ДУ), который может быть реализован, например, на сельсинах или поворотных трансформаторах (один механически связан с задающим устройством, а второй с осью вращения объекта управления, а между собой они связаны электрически). В первый момент угол поворота ОУ отличается от угла задания . На выходе ДУ возникает напряжение U—, пропорциональное разности этих двух углов, которое подается на вход уcилительно-преобразовательного устройства (УПУ). УПУ выполняется обычно на полупроводниковых и интегральных элементах, его состав и структура определяются выбором типа исполнительного двигателя (Д). В конечном итоге УПУ должно обеспечить усиление сигнала рассогласования по мощности, достаточной для управления двигателем.
Под действием сигнала рассогласования двигатель начинает вращаться.
Начинает вращаться и объект управления, который механически связан через понижающий редуктор (Р) с валом двигателя. При этом разность углов и уменьшается, а в момент, когда она будет равна нулю, происходит остановка двигателя, так как U— тоже будет равно нулю. Таким образом, ОУ повернется на заданный угол .
Следящая система «угол-угол» по своему функциональному назначению и составу элементов является характерным примером электромеханических систем автоматического управления.
Другим примером может быть система автоматической стабилизации скорости вращения электродвигателя, широко используемая в том или ином исполнении во многих сложных технических устройствах. Функциональная схема системы стабилизации скорости приведена на рисунке 1.2.
Система стабилизации предназначена для поддержания заданной скорости вращения двигателя вне зависимости от изменений нагрузки (момента нагрузки на валу двигателя) и других внешних возмущающих факторов. В отличие от первого примера, в данной системе реализуется отрицательная обратная связь по скорости вращения двигателя. Для этой цели служит тахогенератор (ТГ), представляющий собой электромашинный преобразователь скорости вращения в пропорциональное ей электрическое напряжение. ТГ располагается на одной оси с двигателем (целый ряд современных двигателей содержат встроенный тахогенератор), а двигатель через редуктор связан с исполнительным органом (ИО), который необходимо вращать с постоянной заданной скоростью. Как и в первом примере здесь реализован принцип регулирования по отклонению. При отклонении скорости вращения ИО от заданной, в силу указанных выше причин, УПУ формирует сигнал рассогласования и подает его на управление двигателем, который изменяет скорость вращения, сводя это рассогласование к минимальному значению.
Анализируя состав и структуру рассмотренных систем можно увидеть в них много общего и сделать вывод о наличии некоторого базового комплекса элементов и устройств присущего электромеханическим системам. Этот комплекс называется — электроприводом. В его состав могут входить электромашинные устройства различного назначения (двигатели, преобразователи, генераторы и т.д.), электронные устройства (усилители, широтно-импульсные преобразователи, модуляторы и демодуляторы и т.д.) и
механические преобразовательные устройства (редукторы, винтовые и червячные передачи и др.).
Современный электропривод является индивидуальным автоматизированным электроприводом. Он включает в себя систему автоматического управления (САУ), которая в простейшем случае осуществляет пуск и останов электродвигателя, а в более сложных случаях управляет технологическим процессом приводимого в движение исполнительного механизма.
Мощность автоматизированного электропривода охватывает диапазон от нескольких долей ватта до десятков тысяч киловатт.
Автоматизированный электропривод делится на управляемый и неуправляемый, постоянного, переменного тока, транзисторный и тиристорный. До недавнего времени в качестве регулируемого электропривода применялся электропривод постоянного тока. В последние годы значительные успехи в силовой преобразовательной технике привели к созданию надежных регулируемых транзисторных и тиристорных электроприводов переменного тока. Так как двигатели переменного тока имеют неоспоримые преимущества перед двигателями постоянного тока (они значительно дешевле, надежнее, имеют лучшие массогабаритные показатели и относительно простую конструкцию) в ближайшие годы ожидается бурное развитие управляемого электропривода переменного тока. Этому способствует широкое внедрение в управляемый электропривод микропроцессорной техники.
Стремление к упрощению кинематических цепей машин и механизмов привело к созданию безредукторных электроприводов, которые по сравнению с редукторными обладают большей надежностью и быстродействием, технологичнее в изготовлении. Предельно упрощает кинематику машин применение управляемого электропривода на базе линейных электрических машин постоянного и переменного тока. При этом создаются максимальные удобства для оптимального конструирования машин с поступательным движением рабочих органов.
Приведем обобщенную функциональную схему электропривода, которая содержит все возможные устройства и поясняет их взаимодействие и взаимовлияние. Обобщенная функциональная схема электропривода приведена на рисунке 2.1, где ИЭ — источник энергии (промышленная электросеть, электромашинный генератор, аккумулятор), ЭПУ — электрическое преобразовательное устройство (управляемый выпрямитель, широтно-импульсный преобразователь, электронный или электромашинный усилитель), ДУ — двигательное устройство (электродвигатель, пьезоэлектрический или магнитострикционный двигатель, электромагнитный двигатель),
МПУ-механическое преобразовательное устройство (редуктор, шарико-винтовая или червячная передача, кинематическая передача), ИО- исполнительный орган рабочей машины (турбина, вентилятор, оптические элементы приборов), УУ- устройство управления
(микропроцессор, управляющая ЭВМ), ЗУ — задающее устройство (ЭВМ, аналоговое устройство), ДПИ — датчики преобразователи информации (тахогенератор, термопара, индуктивные и емкостные датчики), сплошными одинарными стрелками обозначены аналоговые электрические сигналы постоянного иди переменного тока, пунктирные стрелки обозначают сигналы, наличие которых или отсутствие, а также форма определяются условиями конкретной технической системы, двойные стрелки обозначают механические связи.
Функции, выполняемые устройствами, входящими в состав электропривода:
ИЭ -обеспечение электропитанием всех элементов и устройств электропривода;
ЭПУ- преобразует сигнал управления в форму требуемую данным двигательным устройством;
ДУ — преобразует электрическую энергию в механическую;
МПУ — обеспечивает изменение параметров вырабатываемой ДУ механической энергии;
ИО — выполняет заданные функции;
УУ-вырабатывает сигнал управления в функции задающего сигнала и различных дополнительных электрических сигналов, содержащих информацию о процессе преобразования энергии, реальных параметрах механического движения ДУ и ИО, кроме того, обеспечивает защиту и блокировку всех электромеханических устройств, входящих в составу электропривода.
ЗУ — формирует сигнал задания на УУ.
ДПИ — датчики-преобразователи информации служат для измерения различных координат электропривода (скорость вращения, ток, угол поворота и др.) и преобразования их в электрические сигналы одинакового вида.
Основными элементами электропривода являются электрические машины, которые могут выполнять функции двигательных устройств, источников энергии, датчиков преобразователей информации.
Структура электромеханической части двухзвенного механизма как объекта регулирования следящей САР положения Текст научной статьи по специальности «Механика и машиностроение»
Аннотация научной статьи по механике и машиностроению, автор научной работы — Валюкевич Юрий Анатольевич, Наумов Иван Иванович
Представлена модель электромеханической части комплекса как объекта системы автоматического регулирования , в которой объект регулирования представляет собой систему электроприводов, взаимосвязанных по трём параметрам управления: кинематической точности, динамической и статической нагрузке; получены уравнения моментов нагрузки электроприводов в зависимости от положения фрагмента изображения и силы сопротивления резанью; рассмотрено влияние массы и места расположения элементов конструкции, закреплённых на поверхности звена, на дополнительный момент нагрузки электропривода при вертикальном расположении механизма
Похожие темы научных работ по механике и машиностроению , автор научной работы — Валюкевич Юрий Анатольевич, Наумов Иван Иванович
Authors present model of the electromechanical part of the complex as an object of automatic control system , in which the object of regulation is a system of actuators, interconnected by three control parameters: kinematic accuracy, dynamic and static load; obtain equations of moments of electric load, depending on the position of an image and the resistance of cut; consider influence of the mass and location of structural elements, mounted on a surface level, on the additional load moment of actuator in a vertical arrangement of the mechanism.
Текст научной работы на тему «Структура электромеханической части двухзвенного механизма как объекта регулирования следящей САР положения»
СТРУКТУРА ЭЛЕКТРОМЕХАНИЧЕСКОЙ ЧАСТИ ДВУХЗВЕННОГО МЕХАНИЗМА КАК ОБЪЕКТА РЕГУЛИРОВАНИЯ СЛЕДЯЩЕЙ САР
Юрий Анатольевич Валюкевич — к.т.н, проф., каф. «Радиоэлектронные системы», e-mail: val_ya@bk.ru
Иван Иванович Наумов — аспирант, каф. «Радиоэлектронные системы», e-mail: naumov_ivan85@mail. ru
ФГОУ ВПО «Южно-Российский государственный университет экономики и сервиса», г. Шахты
Authors present model of the electromechanical part of the complex as an object of automatic control system, in which the object of regulation is a system of actuators, interconnected by three control parameters: kinematic accuracy, dynamic and static load; obtain equations of moments of electric load, depending on the position of an image and the resistance of cut; consider influence of the mass and location of structural elements, mounted on a surface level, on the additional load moment of actuator in a vertical arrangement of the mechanism.
Представлена модель электромеханической части комплекса как объекта системы автоматического регулирования, в которой объект регулирования представляет собой систему электроприводов, взаимосвязанных по трём параметрам управления: кинематической точности, динамической и статической нагрузке; получены уравнения моментов нагрузки электроприводов в зависимости от положения фрагмента изображения и силы сопротивления резанью; рассмотрено влияние массы и места расположения элементов конструкции, закреплённых на поверхности звена, на дополнительный момент нагрузки электропривода при вертикальном расположении механизма.
Keywords: double pole mechanism, automatic control system, moment of inertia, electromechanical circuit.
Ключевые слова: двухзвенный механизм, система автоматического регулирования, момент инерции, электромеханическая схема.
В настоящее время для контурной обработки материалов применяется оборудование, к которому в условиях малого бизнеса предъявляются такие требования, как уменьшение сложности эксплуатации и технического обслуживания, высокая мобильность и простота конструкции. В связи с этим особую актуальность приобретает разработка двухзвенного механизма [1], обладающего перечисленными характеристиками, в котором для управления перемещением рабочего инструмента при
механической обработке плоских материалов необходимо использовать следящую систему автоматического регулирования (САР) положения электроприводов звеньев.
Современный рынок оборудования предлагает весьма широкий выбор комплектных электроприводов, при этом стоимость одного комплекта с электродвигателем мощностью 0,1 — 1 кВт превышает 15 тыс. руб. Если же в комплектном электроприводе использовать силовой широтно-импульсный преобразователь и микроконтроллер с достаточно высокой вычислительной мощностью и быстродействием (например ЛКМ9), то можно снизить затраты на эту часть оборудования приблизительно наполовину.
В разработанном двухзвенном механизме для привода обеих координат используются электродвигатели постоянного тока (ДПТ), в результате чего этот механизм можно применять в бытовых условиях, при отсутствии трёхфазной сети, что является достаточно весомым аргументом в пользу ДПТ.
Для расчёта САР выбрана одномассовая математическая модель, в которой учтены силы трения. Принято, что вал электродвигателя абсолютно жёсткий и люфт в зубчатой передаче отсутствует. Структурная схема модели электромеханической системы как объекта управления САР представлена на рис. 1, на котором приняты следующие обозначения: и1(5), и2(5) — управляющие сигналы координат 1 и 2 (напряжение якоря); ^е1(5), Же2(5) — передаточные функции электрической части электродвигателей 1- и 2-го звеньев соответственно; Км1, Км2 — коэффициент передачи по моменту электродвигателей 1- и 2-го звеньев соответственно; Ке1, Ке2 — коэффициент передачи по ЭДС электродвигателей 1- и 2-го звеньев соответственно; К11, К21, Квт1 — коэффициенты сухого и вязкого трения механического 1-го звена; К12, К22, Квт2 — коэффициенты сухого и вязкого трения механического 2-го звена; Жм1(5), Жм2(5) — передаточные функции механической части электроприводов 1 и 2 соответственно; Жя1(5), Жя2(5) — передаточные функции по положению валов электроприводов 1 и 2 соответственно; Ка, Кр — коэффициенты передачи по механическому моменту 1- и 2-го звеньев соответственно; г — передаточное число между электродвигателями и 1- и 2-м звеньями механизма; К — коэффициент передачи по моменту инерции; 11(5), 12(5) — изображение сигналов тока якоря электродвигателей 1- и 2-го звеньев соответственно; Мтр1(5), Мтр2(5) — изображение
сигнала полного момента трения 1- и 2-го звеньев соответственно; <&]_($), ф2(5) -изображение сигнала углового положения вала электродвигателей 1 и 2 соответственно; а(5), в(5) — изображения сигналов углового положения осей 1 и 2
механизма; ,Рст — изображение сигнала силы сопротивления, приложенной к 1- и 2-му звеньям механизма; / — тригонометрическая функция.
Параметры передаточной функции якорной цепи электродвигателя определяются экспериментально:
где Ке — активное сопротивление ротора электродвигателя, полученное методом непосредственного измерения, Те — постоянная времени якорной цепи электропривода, полученная исходя из переходной характеристики якорной цепи электродвигателя. Коэффициент передачи по моменту определяется из выражения
Коэффициент передачи обратной связи по ЭДС двигателя находится по формуле КС= еФ^ или из выражения
где /яхх — ток холостого хода и Охх — скорость холостого хода, определяемые при
непосредственном измерении; Се — конструктивная постоянная электродвигателя; Ф — магнитный поток электродвигателя.
Электромеханическая постоянная времени передаточной функции электромеханической части электропривода определяется по формуле
Суммарный момент инерции каждого из электроприводов можно представить в
где 7 — момент инерции, приложенный к валу электродвигателя; 7 — момент инерции ротора двигателя; Уш. — суммарный момент инерции звена; і — передаточное число от электродвигателя к механизму.
Рис. 1. Структурная схема электромеханической части системы
Рис. 2. Схема механической части системы: 1 — несущий круг; 2 — опорное кольцо; 3 — сегмент; 4 — электродвигатель привода 1-го звена (круга); 5 — электродвигатель привода 2-го звена (сегмента); 6 — рабочий инструмент
На рис. 2 приведена схема механической части системы.
Ось инерции 1-го звена совпадает с центром круга 1 и связанной с ним системой координат Х10171. Ось инерции 2-го звена проходит через центр окружности, которой принадлежит сегмент 3 и связанная с ним система координат Х202У2.
Обозначим момент инерции для каждого элемента:
• относительно системы координат Х101У1: несущий круг — Л; опорное кольцо -У2; сегмент — У31; ДПТ2 — 351; инструмент — 761; сегмент и инструмент — У361;
• относительно системы координат Х20272: сегмент — У32; ДПТ2 — У52; инструмент — 762; сегмент и инструмент — У362.
При этом для моментов справедливо следующее соотношение:
Для определения электромеханической постоянной времени электропривода 1-го звена при двух крайних положениях 2-го звена используется соотношение
а электромеханической постоянной времени электропривода 2-го звена —
Тэм2 = — (7д + (732 + 762 )/*■2 ).
Параметры модели моментов нагрузки на электроприводы звеньев можно определить исходя из следующих предпосылок:
• известны модуль и направление силы сопротивления Ес при механической обработке материала;
• известны текущие угловые координаты звеньев а и в и, следовательно, точка приложения силы.
Для определения модулей сил сопротивления обычно используется правило параллелограмма, иллюстрация которого приведена на рис. 3. На этом рисунке приняты следующие обозначения: Ес — сила сопротивления движению, приложенная к рабочему инструменту; Г1 и Р2 — силы сопротивления, приложенные к 1- и 2-му звеньям соответственно.
Рис. 3. Диаграмма разложения на составляющие вектора силы сопротивления, приложенной к рабочему инструменту
Используя теорему синусов, можно определить модули силы сопротивления движению звеньев Г^ Г2:
где у — угол между векторами сил сопротивления Г, и Г2; у1 — угол между векторами сил Гс и Г,; у2 — угол между векторами сил Гс и Г2.
Вектор сил Г, и Г2 лежат на касательных к окружностям с центрами в начальных точках 1- и 2-го звеньев точке пересечения этих окружностей (рис. 4).
Рис. 4. Геометрическая интерпретация определения силы сопротивления на
Путем несложных геометрических преобразований можно определить углы в уравнениях (11) и (12):
Здесь в — угол между Ес и осью абсцисс.
Соотношения (13) — (15) справедливы при соблюдении неравенства в <о2, где
(71,0'2 — углы между Г1, ¥2 и осью абсцисс соответственно, в противном случае необходимо использовать соотношения
Особенностью двухзвенного механизма является то, что привод установлен не в центре оси вращения, который традиционно принимается за начало звена в манипуляторах, а на ее конце. Однако кинематическая модель рассматриваемого устройства полностью совпадает с моделью классического двухзвенного манипулятора.
Принятое в данной работе конструктивное решение превращает звено манипулятора в элемент понижающего редуктора, что позволяет избежать установки дополнительного редуктора при одинаковом моменте электропривода классического манипулятора и предлагаемого технического решения. В связи с этим момент сопротивления для каждого привода необходимо рассчитывать, учитывая это обстоятельство. На рис. 5 приведены чертежи кинематики звеньев двухзвенного механизма с учётом его конструктивных особенностей.
На этом рисунке приняты следующие обозначения: Оп1, Оп2 — оси вращения зубчатых колес электропривода; От1, От2 — оси вращения механизма; Яп31, Яп32 — радиусы зацепления зубчатого колеса привода; Ят31, Ят32 — радиусы зацепления зубчатых колес 1-и 2-го звеньев ; г — радиус точек приложения силы сопротивления 1-го звена; Я — радиус точек приложения силы сопротивления 2-го звена.
Модули силы сопротивления на зубчатых колесах 1- и 2-го звеньев определяются из соотношений
Рис. 5. Кинематика звеньев двухзвенного механизма
Статические моменты нагрузки электропривода равны:
Учитывая (11) — (15), выражения для моментов нагрузки электроприводов звеньев можно записать в следующем виде:
Для получения характеристик моментов нагрузки электродвигателей звеньев при различных направления перемещения рабочего инструмента были выбраны траектории этого перемещения, заданные отрезками прямых 1 — 4 на рис. 6.
Рис. 6. Направления перемещения рабочего инструмента для расчёта моментов сопротивления звеньев механизма
Характер изменения моментов нагрузки Ес 1- и 2-го звеньев при перемещении рабочего инструмента по траекториям, заданными отрезками прямых 1 — 4 , приведён на рис. 7 — 10.
Рис. 7. Изменение модуля момента на валах электроприводов при перемещении по прямой 1: а — электропривода 1-го звена; б — электропривода 2-го звена
Рис. 8. Изменение модуля момента на валах электроприводов при перемещении по прямой 2: а — электропривода 1-го звена; б — электропривода 2-го звена
Рис. 9. Изменение модуля момента на валах электроприводов при перемещении по прямой 3: а — электропривода 1-го звена; б — электропривода 2-го звена
Рис. 10. Изменение модуля момента на валах электроприводов при перемещении по прямой 4: а — электропривода 1-го звена; б — электропривода 2-го звена
При эксплуатации механизма в случае вертикального расположения зоны обработки возникают дополнительные моменты сопротивления, приложенные к валам электродвигателей, которые обусловлены несимметрией приложения центра масс отдельных элементов звеньев относительно осей вращения звеньев. Распределение центров масс для обоих звеньев показано на рис. 11, где для первого звена приведено такое положение механизма, при котором нагрузка электропривода этого звена будет максимальна.
Рис. 11. Распределение центров масс при вертикальном расположении зоны обработки 1-гозвена (а) и 2-го звена (б)
На рис. 11 приняты следующие обозначения: х5, _у5 — координаты центра масс элемента конструкции 5 (см. рис. 2) относительно оси вращения 1-го звена; х36, ,у3б —
эквивалентные координаты центра масс элементов конструкции 3 и 6 относительно оси вращения 1-го звена; ф1 — угол между осью абсцисс и вектором направленным из центра вращения 1-го звена к точке с координатами х5, _у5 при а = 0; ф2 — угол между осью абсцисс и вектором, направленным из центра вращения 1 -го звена к точке с координатами х36, ,у3б при а = 0; х'36, у36 — эквивалентные координаты центра масс элементов конструкции 3 и 6 относительно оси вращения 2-го звена; ф3 — угол между средней линией сегмента элемента конструкции 6 и вектором, направленным из центра вращения сегмента к точке с координатами х'36, у36.
Исходя из рис. 11, выражения для дополнительных моментов нагрузки электроприводов звеньев имеют вид
где т5, т36 — массы элементов конструкции соответствующих звеньев; g — ускорение свободного падения.
Анализ уравнений (25), (26) показывает, что значения моментов, определяемых весом элементов конструкции, могут иметь как отрицательный, так и положительный знак по отношению к моменту электродвигателей звеньев. Данное обстоятельство должно быть учтено при конструировании САР положения электроприводов.
Представленная в работе методика расчёта параметров электромеханической системы двухзвенного механизма может быть использована при выборе мощности электроприводов структуры следящей САР положения 1- и 2-го звеньев.
1. Валюкевич Ю.А., Наумов И.И. Устройство для силомоментной обработки плоских материалов на базе двухзвенного механизма // Научно-технические ведомости СПбГПУ. 2010. №1 (95) С. 177 — 181.
Большая Энциклопедия Нефти и Газа
Электромеханические системы управления бывают двух типов: разомкнутые и замкнутые. Система разомкнутого типа — это электрические и механические устройства, соединенные между собой, образующие законченную систему, предназначенную для выполнения определенной функции при подаче соответствующей команды. [2]
Электромеханическая система управления имеет свою электрическую схему. [3]
Электромеханическая система управления имеет свою электрическую схему. Электрическая схема делится на цепи главного тока ( силовые) и цепи управления. [4]
Рассмотренная электромеханическая система управления позволяет фрезерному станку обрабатывать по копиру заготовки сложной конфигурации со скоростью до 375 мм / мин. Величина скорости копирования, зависящая от быстродействия следящей системы, ограничивается недостаточно эффективной обратной связью и малым коэффициентом электронного усилителя. [5]
Полуавтоматический гравировально-токар-ный станок со следящей электромеханической системой управления был построен в 1901 г. французом Аврилем. [6]
В качестве дистанционных используют чаще всего гидравлические, электрогидравлические и электромеханические системы управления . [8]
Фрезерные и токарные станки оснащаются также электромеханическими системами управления . [10]
На рис. 2.13 ( 3) изображена разомкнутая электромеханическая система управления . Генератор, якорь которого вращается с постоянной скоростью, вырабатывает напряжение, поступающее на обмотку возбуждения двигателя. Двигатель обладает моментом инерции Jm и коэффициентом трения Ът. [11]
Регулятор этого типа надежен в работе, но сравнительно громоздок, имеет довольно сложную электромеханическую систему управления , обладает значительной инерционностью и поэтому не позволяет осуществлять регулирование с произвольной скоростью. Кроме того, он требует постоянного надзора за трущимися частями и контактами реле управления. [13]
Так, например, успешно эксплуатируется струйная система управления прессованием абразивных кругов. Система работает в условиях чрезвычайной загрязненности воздуха абразивной пылью, что резко снижает надежность электронных и электромеханических систем управления . [14]
В этом реакторе в качестве ядерного горючего используется слабообогащенная двуокись урана-235 и образующийся в процессе работы реактора плутоний. Основными конструктивными элементами реактора ВВЭР являются: корпус высокого давления, внутри-корпусные устройства, верхний блок с электромеханической системой управления и защиты реактора. Активная зона состоит из 349 топливных кассет, размещенных в выемной корзине. В корпусе реактора поддерживается рабочее давление теплоносителя — замедлителя воды, равное 125 атм. [15]
Конспект лекции
«Автоматическое управление электромеханическими объектами»
1. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ЭЛЕКТРОМЕХАНИЧЕСКИМИ ОБЪЕКТАМИ 1.1.Общие положения Помимо задачи построения системы автоматического управления так называемыми технологическими процессами существует огромное количество систем управления объектами, снабженными регулируемым электроприводом. Порядок построения такого рода систем остается практически тем же, который мы рассматривали ранее, но есть некоторые принципиальные особенности, которые учитываются как в вопросах синтеза САР, так и в вопросах их технической реализации. Основное принципиальное отличие, которое и определяет специфику построения далее рассматриваемых систем, заключается в том, что в этих системах управления регуляторы сами имеют ту же физическую сущность, что и элементы привода (в электроприводе электронные регуляторы, в гидравлическом приводе гидравлические регуляторы, в пневматическом – пневморегуляторы и т.п.). Такая отличительная особенность систем с регулируемым приводом предопределила отсутствие необходимости использовать специальные исполнительные механизмы и регулирующие органы. Функции регулирования объекта выполняет сам привод, непосредственно связанный с механической частью объекта. При этом все системы управления электромеханическими объектами в настоящее время классифицируются следующим образом: 1. Системы подчиненного регулирования (системы с последовательной коррекцией) – это системы, в которых в качестве регулирующих устройств используются операционные усилители с пассивными цепочками) на входе и в обратной связи. 3 цепями (RC- 2. Системы автоматического регулирования с параллельной коррекцией или параллельного управления – системы, в которых регуляторы реализуются не на дополнительных электронных установках, а используют для этого сами функционально необходимые элементы электропривода путем присоединения к ним пассивных RC-цепей либо на выходе, либо в цепи обратной связи. 3. Системы переменного управления или системы с параллельной структурой, в которых различные регуляторы с соответствующими алгоритмами регулирования включаются в систему в зависимости от ее функционального состояния. Пример. Двухконтурная система подчиненного регулирования электромеханического объекта (рис. 1) Yз 1 Рег 1 (-) Yз 2 Рег 2 Z Об 1 Y2 Об 2 Y1 — Рис. 1 Пример построения двухконтурной системы подчиненного регулирования электромеханического объекта Контур регулирования «Рег 2 – Об 1» называется внутренним контуром. Контур «Рег 1 – замкнутый внутренний контур – Об 2» называется внешним контуром. Как видно из структуры, внутренний контур является составной частью внешнего контура и ему подчиняется. Это обстоятельство определяет как достоинство, так и недостаток таких систем. Достоинство: простота решения задачи синтеза или расчета структуры и параметров регуляторов, так как, по сути, последовательно осуществляется переход от внутреннего контура к внешнему. 4 Недостаток: настроечные параметры внешнего регулятора зависят от настроечных параметров внутреннего контура, то есть все помехи, все отклонения от нормального режима работы внутреннего контура сказываются на сбоях, регулировании внешнего контура. Особенностью 2-ого типа систем в отличие от 1-ого типа является формирование законов регулирования и, соответственно, регуляторов, используя усилительные свойства функционально необходимых элементов электропривода, а не с помощью отдельных самостоятельных регуляторов. Реализация требуемого закона регулирования осуществляется путем включения либо в прямую связь, либо в обратную соответственно пассивных электрических цепей. Пример (рис. 2): Yз 1 ОС 1 ОС 2 Об 1 Об 2 Y1 — ГОС Рис. 2 Пример построения двухконтурной системы параллельного регулирования электромеханического объекта ГОС – главная обратная связь, как правило, отрицательная. Об 1 – составная часть общей электромеханической системы. Об 2 – оставшаяся часть общей электромеханической системы. ОС 1 – обратная связь, структура и параметры которой в целом определяют статические и динамические свойства 1-ой части системы Y2 = f1 (Y31) 5 ОС 2 – обратная связь вторая; определяет статический и динамический характер второй части системы. Y1 = f2 (Y 2) Пример построения регулятора на функционально необходимом элементе электропривода – тиристорном преобразователе ТП показан на рис. 3. Кос Uвх ΔU ТП Uвых Рис. 3 Пример построения И-регулятора WТП ( р) = U вых ( р) kТП = U ( р) Т ТП р + 1 kТП kТП Т ТП р + 1 WС ( р) = = k k Т ТП р + 1 − kТП kОС 1 − ТП ОС Т ТП р + 1 Если теперь выбрать kОС = WС ( р) = kТП 1 = Т ТП р Т И р 1 kТП , то: — получили на тиристорном преобразователе классический идеальный И-регулятор. Здесь Т И = Т ТП kТП Достоинства: использование усилительных свойств функционально необходимых элементов при формировании законов регулирования, что позволяет существенно сократить мощности регулирующих устройств. 6 Недостаток: главный недостаток тот же самый, что и в системах 1-ого типа – зависимость настроечных параметров регуляторов в контурах регулирования друг от друга. Третий вид систем – системы переменного управления или системы с переменной структурой. Особенностью такого рода систем является наличие блока формирования структуры, функциональное назначение которого заключается в том, чтобы включать тот или иной канал регулирования в зависимости от статического или динамического состояния системы. По аналогии с системой параллельного управления с теми же обозначениями представим вариант системы с переменной структурой (рис. 4). Y2 Об 1 Yз 1 Y1 2 Об Y1 (-) БИС ОС 1 ГОС ОС 2 Рис. 4. Пример построения двухконтурной системы переменного управления механического объекта БИС – блок изменения структуры, зависящий в своих действиях от состояния системы и включающий либо раздельно ОС1, ОС2, ГОС, либо в комбинациях между собой. То есть БИС – это логическое устройство, которое формирует заданные качественные характеристики замкнутой системы автоматического регулирования в тот или иной момент управления в зависимости от состояния системы в этот момент времени. 7 Простой пример: есть замкнутая система (рис. 5), в которой может скачкообразно изменяться величина обратной связи ОС от минимального значения ОС1 до максимального ОС2. Причем в первом случае значение ОС1 обеспечивает монотонный апериодический процесс в замкнутой системе автоматического регулирования, но при этом велика длительность переходного процесса. Во втором случае при ОС2 существенно возрастает быстродействие, но одновременно появляется значительная колебательность. Для того, чтобы придать системе высокое быстродействие и обеспечить при этом колебательный апериодический переходный процесс, надо в определенный момент произвести переключение обратной связи с ОС2 на ОС1, что и производит блок изменения структуры БИС. БИС ОС — x(t) Прямая цепь САР y(t) x, y y(t ) ОС =ОС 2 Момент переключения y(t) y (t ) ОС =ОС1 x(t) t Рис. 5. К вопросу построения систем с переменной структурой 8 Достоинством таких систем является все, что было недостатком предыдущих – независимость каналов регулирования во времени, что предопределяет простые методы синтеза таких систем, осуществляемые по отдельным каналам регулирования. Недостаток: необходимость иметь специальное вычислительное устройство БИС, что усложняет систему в целом, и в свою очередь ухудшает ее надежность. 1.2. Процедура построения систем автоматического регулирования с вышерассмотренными структурами Несмотря на различия представленных структур, может быть предложена единая процедура их построения. 1. Составляется математическое описание динамических свойств объекта регулирования – известной части системы (в любом виде: дифференциальных уравнений, частотных характеристик, передаточных функций и т.п.). 2. Динамические свойства известной части системы представляются в виде передаточных функций по любым каналам, и производится расчленение их на основе принципа суперпозиции. Например, для системы (рис. 6): z(t) x(t) y(t) САР Рис. 6. Структура типовой системы WC ( p) = W1 ( p) + W2 ( p) ; W1 ( p) = 9 y ( p) y ( p) ; W2 ( p ) = z ( p) x( p) 1. В общей структуре САР выделяют условно независимые каналы регулирования. Если эта система подчиненного регулирования, то им дают условные обозначения «внутренний» канал, «внешний» и т.д. 2. Задаются динамическими свойствами синтезируемых замкнутых каналов регулирования. Как правило, в виде желаемых передаточных функций разомкнутых контуров. 3. Определяют структуру и параметры регуляторов в каналах регулирования, двигаясь последовательно от внутреннего контура к внешнему и т.д. При выборе структуры и параметров регуляторов внешних контуров к известной части системы добавляется замкнутый внутренний контур. 4. Предлагается вариант технической реализации регуляторов в виде отдельных технических устройств: операционных усилителей с соответствующими пассивными цепями на входе и в обратной связи, либо в виде алгоритма и последующей программы на соответствующем языке выбранного микропроцессорного устройства. 1.3. Представление заданных динамических и статических свойств замкнутых систем автоматического управления общепромышленными электромеханическими объектами 1. Допущения: Объект или известная часть системы (без регуляторов) относится к классу априорно устойчивых объектов, не содержащих внутри себя неминимальнофазовые звенья. Это выполняется практически всегда на тех объектах техники, где возникает такая задача. 2. Критерием качества замкнутых контуров или систем автоматического регулирования в целом выступает заданный вид АФЧХ разомкнутого контура или соответствующая ей передаточная функция разомкнутого контура Wрк (р), так как она в полной мере с учетом принятого нами допущения характеризует статические и динамические свойства замкнутых контуров. 10 3. Из всего многообразия заданного вида передаточных функций разомкнутого контура в системах автоматического управления электромеханическими объектами в последние годы используются 2 вида: а) Передаточная функция разомкнутого контура, соответствующая замкнутому контуру, настроенному на так называемый технический или модульный оптимум WРК ( p) = 1 , 2T p(T p + 1) где Тμ – сумма так называемых «малых» некомпенсируемых постоянных времени объекта. Заметим, что в передаточной функции Wрк(р) никаких иных параметров кроме Тμ нет, значит динамические свойства замкнутого контура, а следовательно и его качество ни отчего иного не зависят! б) Передаточная функция разомкнутого контура, соответствующая замкнутому контуру, настроенному на, так называемый, симметричный оптимум WРК ( p) = 8T p + 1 32T2 p2 (2T p + 1) . Сравнение динамических качеств систем, настроенных на модульный и симметричный оптимум 1. WРК ( p) = 1 , или соответствующая ей ЛАЧХ (рис. 7) 2T p(T p + 1) 11 -20 дб/дек L(ω) 1 С = 2Т ω 1 = Т -40 дб/дек Рис. 7. ЛАЧХ системы с настройкой на технический оптимум Замкнутая система, соответствующая такой ЛАЧХ, астатическая с астатизмом 1-ого порядка, что обозначает, что статическая ошибка в ней по управляющему воздействию равна нулю. По возмущающему воздействию статическая ошибка существует и существует динамическая ошибка 1-ого порядка по управляющему воздействию. Если подать на вход замкнутой системы ступенчатое скачкообразное воздействие при единичной обратной связи, переходная характеристика будет иметь вид (рис. 8): x(t) y(t) x(t) y(t) t Рис. 8. Переходная характеристика системы с настройкой на технический оптимум 12 Перерегулирование в системе с настройкой на модульный оптимум σ = 4-5%, очевидной колебательности практически нет. Если на вход системы подавать линейно изменяющееся в функции времени воздействие (рис. 9): x(t) y(t) точка появления возмущения x(t) σ x(t) y(t) Δ y(t) t Рис. 9. Реакция системы с настройкой на технический оптимум на линейное воздействие 1. Система с высоким запасом устойчивости по фазе и амплитуде: с=0,7; γ = 65˚. З ( р) = 2. WРК 8Т р + 1 32Т2 р2 (2Т р + 1) , или соответствующая ей ЛАЧХ (рис.10): -40 дб/дек -20 дб/дек 1 8Т 1 32 Т С 1 2Т -40 дб/дек Рис. 10. ЛАЧХ системы с настройкой на симметричный оптимум 13 Система астатическая с астатизмом 2-ого порядка. Значит статическая ошибка по управляющему воздействию равна нулю, отсутствует по управляющему воздействию динамическая ошибка 1-ого порядка, статическая ошибка по возмущению также равна нулю. Если подать на вход системы с единичной обратной связью скачкообразное ступенчатое воздействие, то график переходного процесса будет следующим (рис. 11): y(t) x(t) x(t) y(t) t Рис. 11. График переходного процесса при подаче на вход системы с единичной обратной связью скачкообразного ступенчатого воздействия При подаче линейно изменяющегося от функции времени воздействия (рис. 12): Рис. 12. График переходного процесса при подаче на вход системы с единичной обратной связью линейно изменяющего от функции времени воздействия 14 С = 0,37; γ = 43˚. По сравнению с системой с настройкой на технический оптимум здесь выше колебательность, меньше запасы устойчивости по амплитуде и по фазе, но выше точность системы в статических и динамических режимах. 1.4. Процедура выбора настроек (структуры и параметров) регуляторов в системах автоматического управления общепромышленными электромеханическими объектами На первом этапе рассмотрению подлежит механическая часть системы с точки зрения минимизации необходимого и достаточного количества дифференциальных уравнений, описывающих динамику механизмов. Наиболее сложный, но точный вариант такого описания – это математическая модель механизма как объекта с распределенными параметрами. Такое математическое описание представляется в виде краевых уравнений или уравнений частных производных. Чаще всего в инженерных задачах при математическом описании механизма переходят от систем с распределительными параметрами к, так называемым, системам с сосредоточенными параметрами с фиксированным значением масс и, как следствие, способам приведения общей массы механизма к этим фиксированным массам. Количество масс определяется характером связи между ними или коэффициентом жесткости связующих эти массы устройств. Например, на рис. 13 представлена 3-хмассовая модель механизма с упругими связями (количество масс может быть больше или меньше). 15 m1 c1 m2 c2 b1 m3 b2 Рис. 13. 3-хмассовая модель механизма с упругими связями Чаще всего главным критерием выбора количество масс при моделировании механизма является соотношение жесткости связующей части механизма и жесткостью самих масс. Если это соотношение отличается на порядок и выше, то необходимо появление в модели дополнительной массы. с1 и с2 – коэффициенты жесткости, характеризующие упругие свойства связи; b1 и b2 – коэффициенты затухания колебаний в упругих связях, , учитывающие действие десипативных консервативных сил, сил внутреннего молекулярного трения. Математическое описание элемента механической системы (рис. 14), осуществляющего связь между массами, выглядит следующим образом: Mус M1 m1 m2 cк ω1 ω2 Mвс J1 J2 bк Рис. 14. Элемент механической системы с упругой связью 16 Итак, J1 d 1 =М1 -МУС dt J1 – момент инерции массы М1. МУС – момент упругой связи или реакция упругой связи на воздействие внешних сил t МУС = ск (2 − 1 )dt − bк (2 − 1 ) I часть II часть Реакция упругих сил пропорциональна перемещению конечных точек упругого звена (точек приложения упругого звена к массам) I часть – перемещение II часть – отражает действие десипативных сил, пропорциональных разности скоростей (либо линейных, либо угловых) масс. J2 d2 = MУС − МВС dt MВС = FВС * Rб Массу упругих связей по определенным уравнениям приводят к массе m1 или массе m2 (как правило, 1/3, 2/3). Рассмотрим процедуру построения непрерывных систем автоматического управления электромеханическими объектами (на примере электромеханической системы с упругой связью в виде каната). 1. Независимо от соотношения жесткости управляемых масс и упругой связью между ними на первом этапе синтеза структуры и параметров электрической части системы любую многомассовую систему представляют как одномассовую с общим моментом инерции Jобщ=J (рис.15), представляющим собой сумму всех моментов инерции, вращающихся и поступательно движущихся отдельных элементов электромеханической системы. 17 Б ωд Мус Д bк Мд ск J Мвс Рис. 15. К задаче приведения моментов инерции масс 2. Производится математическое описание статики и динамики известной части системы (объекта). В качестве примера рассмотрим систему автоматического управления электромеханическим объектом, снабженным электрическим приводом постоянного тока с полупроводниковым источником питания якорной цепи (тиристорным или транзисторным силовым) и независимым возбуждением двигателя и двухконтурной системой подчиненного регулирования с контурами тока и скорости (рис.16). Мвс з Wрс(р) (-) Iз I Wрт(р) Uрт т Iя Uя Wп(р) Wя(р) c Мд (-) М Wмч(р) (-) IЯ Д Wдт(р) Wдс(р) Рис. 16. Система автоматического управления электромеханическим объектом, снабженным электрическим приводом постоянного тока с полупроводниковым источником питания якорной цепи (тиристорным или транзисторным силовым) и независимым возбуждением двигателя и двухконтурной системой подчиненного регулирования с контурами тока и скорости 18 Д Здесь: Uя – напряжение якорной цепи или выходное напряжение полупроводникового преобразователя; Iя – ток якорной цепи; Мд – движущий момент; Мвс – момент внешних сил; ωд – частота вращения или угловая скорость; — сигналы напряжения, пропорциональные соответствующему параметру; Wрс(р) – передаточная функция регулятора скорости; Wрт(р) – передаточная функция регулятора тока; Wп(р) – передаточная функция преобразователя (полупроводниковый преобразователь); Wя(р) – передаточная функция якорной цепи; С – коэффициент пропорциональности; Wмч(р) – передаточная функция механической части системы; Wдт(р) – передаточная функция датчика тока; Wдс(р) – передаточная функция датчика скорости; Wп(р), Wя(р), Wмч(р) – входят в понятие известной части системы или объекта. Искомыми являются передаточная функция внутреннего контура Wрт(р) и передаточная функция внешнего контура Wрс(р). Порядок нахождения структуры регуляторов: WП ( p) = UЯ ( р ) kП = ; UРТ ( р) ТП р + 1 UЯ = IЯ RЯ + LЯ dIЯ + ЕД ; dt ЕД = сД ; МД = сIЯ ; I d Д dt = MД -МВС ; 19 ММЧ ( р) = Д ( р) = Д ( р) М( р) МД J р = = 1 J р ; сIЯ ; J р с2 IЯ ( р ) ; UЯ = IЯ RЯ + LЯ рIЯ ( р ) + J р J p IЯ ( р) = ; UЯ ( р) I RЯ р + LЯ J p2 + c2 J p 2 IЯ ( р) c WЯ ( р) = = . UЯ ( р) LЯ J 2 J RЯ р + 2 р +1 с2 с При синтезе регулятора тока полином в знаменателе приводят к виду: J WЯ ( р) = р Найдя LЯ J с2 корни р2 + J RЯ с2 р1 и c2 . (Т1 р + 1)(Т2 р + 1) р2 характеристического р + 1 = 0 и приняв Т1 = − уравнения 1 1 и Т2 = − , находят численр1 р2 ные значения введенных величин постоянных времени. Представление передаточной функции якорной цепи в виде произведения идеального дифференциального звена и апериодического звена второго порядка вместо произведения дифференциального звена на колебательное звено второго порядка связано с последовательной процедурой выбора структуры и параметров регулятора тока. В этом случае она существенно упрощается, но предполагает обязательным этап анализа замкнутого контура тока на последней стадии рассматриваемой задачи, то есть при моделировании системы. 20 При этом постоянная времени Т1 по своему численному значению близка к электрической постоянной времени привода, а Т2 близка к электромеханической постоянной времени. В реальных общепромышленных объектах Т1<<Т2 . Поэтому величина Т1 вместе с постоянной времени полупроводникового преобразователя Тп могут быть включены в понятие Тμ, или: Тμ= Тп+Т1 Передаточная функция известной части контура тока: ИЧ ( р ) WКТ kП J pkДТ 2 c = (Т р + 1)(Т2 р + 1) (1) 1.Задаются динамическими свойствами будущего замкнутого контура тока в виде желаемой передаточной функции разомкнутого контура. Как правило, внутренние контуры рассматриваемых нами автоматических систем настраивают на технический или модульный оптимум. Ж ( р) = WРКТ 1 2Т р(Т р + 1) (2) Из (1) и (2) определяют передаточную функцию регулятора: WРТ ( р) = 1(Т р + 1)(Т2 р + 1) Т2 р + 1 1 1 = = (kPТ + ) J J р T р И 2Т р(Т р + 1)kП 2 pkДТ р2 2Т kП 2 kДТ c c (И+ПИ-регулятор) kРТ = Т2 J 2Т kП ТИ = 2Т kП c2 J c2 ; kДТ kДТ ; 21 – 4. При определении структуры и параметров регулятора скорости необходимо найти передаточную функцию замкнутого контура тока, так как именно он входит в состав известной части контура скорости. (Т2 р + 1)kП WРТ ( р)WП ( р )WЯ ( р ) WЗКТ ( р) = = 1 + WРТ ( р)WП ( р)WЯ ( р)kДТ p2 2ТИ kП J c2 J c2 p kДТ (Т р + 1)(Т2 р + 1) 1 1+ (Т р + 1) 2Т р = 1 p2 Т kДТ (Т р + 1) 1 1 = = = 2Т р(Т р + 1) + 1 p 2Т kДТ (Т р + 1) + 1 2Т2 р2 kДТ + kДТ Т р + kДТ 2Т р(Т р + 1) 2Т2 принимают равным нулю в силу ее малости ( 2Т2 0 ), тогда WЗКТ ( р) 1 kДТ 2Т р + 1 . Итак, известная часть контура скорости выглядит следующим образом: ИЧ ( р ) = WКС 1сkДС kДТ (2Т р + 1) с = 1 J p kДС kДТ (2Т р + 1) . 5.Контур скорости настраивают как на технический, так и на симметричный оптимум: Ж ( р) = В первом случае WРКС 1 . 4Т р(2Т р + 1) Находят искомую передаточную функцию регулятора скорости из соотношеЖ ( р) WРКС ния WРС ( р) = ИЧ : WКС ( р) 22 WРС ( р) = 1kДТ (2Т р + 1) J p 4Т р(2Т р + 1)сkДС = kДТ J 4Т сkДС = kРС – (П-регулятор) Определив численные значения параметров регуляторов всех контуров, приступают к моделированию отдельных контуров, «двигаясь» от внутреннего к внешнему и всей системы в целом. Целью моделирования является корректировка параметров регуляторов, не изменяя их структуры, и последующий анализ статических и динамических свойств системы в целом с учетом специфики эксплуатации объектов в реальных условиях. Процедура моделирования осуществляется в строгом соответствии с полной алгоритмической структурой системы без учета допущений, которые были приняты на этапе синтеза регуляторов. В частности, применительно к рассматриваемому нами электромеханическому объекту, снабженному электроприводом постоянного тока с двигателем независимого возбуждения, алгоритмическая структура, подлежащая моделированию, будет выглядеть следующим образом: 1. Без учета упругости каната (рис. 17): Мвс з Крс — Uрс т К РТ + 1 1 р Т ИТ р Uрт т Uя КП ТП р +1 J p2 J LЯ c2 — IЯ p2 + p J RЯ c2 Мд (-) Iя с p +1 Кдт Д Кдс Рис. 17. Алгоритмическая структура системы без учета упругости каната 2. С учетом упругости каната МУС = сК (2 − Д )dt − bК (2 − Д ) : J1 J2 d Д dt = МД -МУС ; d2 = МУС -МВС dt 23 Д 1 J p СПИСОК ЛИТЕРАТУРЫ Карпов Ю. Г. Теория автоматов: учебник для вузов/Ю. Г. Карпов. – СПб: Изд-во «Петер», 2002. – 224 с. Лапин Э. С. Принципы построения релейных устройств автоматизации: метод. указания для самостоятельной работы по курсовому проектированию/Э. С. Лапин. – Свердловск: Изд. СГИ, 1989. – 34 с. Лукас В.А. Теория управления техническими системами: компактный учеб. курс для вузов/В. А. Лукас. – 3-е изд., перераб. и доп. – Екатеринбург: Изд-во УГГГА, 2002. – 675 с.: ил. 214. 24