энкодер для лифтов
Обеспечение ежедневной безопасной и надежной езды — цель лифтовой индустрии. Энкодеры для лифтов (например, энкодер Came) позволяют точно контролировать вертикальный подъем и измерение скорости, что необходимо для обеспечения охраны жизнеобеспечения пассажиров и механической безопасности в соответствии с производственными стандартами.

Основные задачи устройств
Для примера рассмотрим универсальный энкодер MSR, который выполняет несколько задач для обеспечения безопасной и эффективной работы электрических подъемников:
- коммутацию двигателя лифта;
- контроль скорости;
- управление дверью;
- вертикальное позиционирование и т.д.
Как видим, энкодер MSR HCC80 обеспечивает надежность и точность определения положения и скорости движения лифта, а также передают эту информацию обратной связи компьютеру, который контролирует и регулирует скорость двигателя лифта. Так что энкодер MSR HCC80 купить будет целесообразно в том случае, если вам нужен надежный компонент системы управления лифтом, который позволяет подъемнику останавливаться на уровне пола, открывать и полностью закрывать двери, а также обеспечивать плавную и комфортную поездку для пассажиров.

Давайте рассмотрим технические особенности двигателя лифта и его коммутацию с кодировщиками.
Конструкция двигателя и его коммутация с энкодерами
Зачастую в разных сферах можно встретить 2 вида электроподъемников:
- с редукторным мотором тягового типа. Такие модели приводятся в движение приводами, подсоединенными к коробке передач. Зубчатый вал обеспечивает движение тяговых колес (в некоторых случаях — шкивов), перемещающих канаты, поднимающие и опускающие подъемник;
- безредукторные модели, оснащенные тяговым движком. Такая конструкция не предполагает использование векторного двигателя (редуктора). Аналогами выступают электродвигатели постоянного тока, которые отличаются довольно большими габаритами, но узким профилем. Эти конструкционные особенности позволяют размещать приводы их над лифтом в шахте подъемника, без необходимости обустройства специального машинного отделения.
Обратная связь по скорости используется для замыкания цикла премещения электроподъемника. Кодировщик (а, зачастую, это контроллер с полым отверстием) устанавливается на непосредственно на корпусе электродвигателя. Так как это прибор для измерения скорости, а не для определения местоположения, энкодеры гарантируют высокий КПД работы при совсем небольших затратах для контроля скорости движения лифта.

Ключевым фактором, который следует учитывать при выборе кодировщика, является правильность сигнала. Так, в инкрементных моделях он, как правило, использует числовые импульсы с правильным поведением и скважностью 50-50, особенно если используются либо обнаружение фронта, либо интерполяция. В подъемниках используется большое количество мощных кабелей, которые создают высокие индуктивные нагрузки. Чтобы свести к минимуму шум, следуйте паре простых советов по установке кодировщика: отделяйте сигнальные провода от силовых, используйте витые пары проводов с дополнительным экранированием.
Не менее важной является и грамотная установка измерительного прибора. Поворотный конец вала электропривода, на котором монтируется энкодер, не рекомендуется подвергать сильной вибрации. Чрезмерная вибрация периодически перегружает подшипник, способствуя его износу и потенциально преждевременному выходу из строя и прочим неполадкам оборудования.
Позиционирование подъемника и управление его дверьми
Кодировщики отвечают и за точность обратной связи для контроля автоматических шторок-дверей в кабине. Их открытие-закрытие обеспечивает AC/DC-электропривод (его место установки верхняя часть кабины). Кодировщик-контроллер следит за тем, чтобы дверцы подъемника полностью открывались, закрывались. необходимо отметить, что поскольку движение шторок может быть медленным при их открытии-закрытии, то кодировщики нужно подбирать максимально качественными, с высокой точностью работы.

Кодировщики с ведомым валом можно использовать для обеспечения того, чтобы электроподъемник прибыл в указанную точку на требуемый этаж. Такие датчики в конструкционном плане являются компактными приборами для измерения расстояния. Состоят они, зачастую, из прибора-измерителя в виде вала (монтируется он прямо на концентраторе). Обычно энкодеры-счетчики устанавливаются либо сверху, либо снизу подъемника при этом вал прижимается к конструктивному элементу шахты подъемника. Когда лифт движется, вал поворачивается, и его перемещение отслеживается контроллером. А тот, в свою очередь, трансформирует выходные данные в положение или расстояние перемещения.
Энкодер: устройство и примеры работы
Нередко статьи у меня на блоге тесно связаны с промышленным оборудованием. На этот раз я подробно рассматриваю энкодер – очень важное устройство, без которого не обходится ни одна солидная производственная линия. А почему энкодер столь важен, будет понятно из моей статьи. Разберём подключение энкодера, его работу, устройство и монтаж. Как обычно в таких статьях, будут реальные примеры работы энкодеров в различных узлах оборудования. И, конечно же, будет много фотографий, сделанных мною лично.
Итак, для начала –
Что такое энкодер?
Энкодер – это электронный датчик, который механически крепится на какой-либо вращающейся детали. Обычно корпус энкодера остается неподвижным, а вращается только его вал. Это позволяет с необходимой точностью измерять разные параметры :
- скорость вращения,
- расстояние (длину),
- направление вращения,
- угловое положение по отношению к нулевой метке.
Энкодер является самым распространенным «измерительным инструментом» в современном промышленном оборудовании. Фактически энкодер является датчиком обратной связи, на выходе которого цифровой сигнал меняется в зависимости от его вращения или от угла его поворота. Этот сигнал обрабатывается в счетчике или контроллере, который выдает команды на устройство индикации или привод.

Этикетка инкрементного энкодера Sick, установленного на валу двигателя постоянного тока. Основной параметр – 1024 импульса на оборот
Энкодеру найдено множество применений, учитывая возможности последующей обработки его сигнала. Например – измерение погонной длины какого-либо материала, измерение угла открытия/закрытия задвижки, точное позиционирование деталей при перемещении и обработке. Конкретные примеры будут ниже.
Энкодеры, о которых идёт речь в статье, в некоторых источниках называются датчиками углового перемещения, датчиками угла поворота, и даже “N-кодером”.
А вообще энкодер – это любое устройство, которое преобразовывает или декодирует какой-то сигнал или информацию.
Принципы работы и устройство энкодеров
Существует два вида энкодеров по конструкции и виду выходного сигнала – инкрементальный (инкрементный) и абсолютный.
Инкрементальный энкодер устроен проще сравнению с абсолютным, и используется в большинстве случаев. Такой энкодер можно представить как диск с прорезями, который просвечивается оптическим датчиком. При вращении этого диска датчик будет активироваться или деактивироваться зависимости от своего положения над прорезью. В результате на выходе энкодера формируется последовательность дискретных импульсов, частота которых зависит от разрешения энкодера и его частоты вращения.
СамЭлектрик.ру в социальных сетях:
![]()
Подписывайтесь! Там тоже интересно!
Например, если энкодер закреплен на валу асинхронного двигателя, который вращается с частотой 1500 оборотов в минуту, то при разрешении энкодера 1000 импульсов на оборот частота выходных импульсов будет равна 25 кГц.
Разрешение и максимальная частота вращения обратнозависимы – на практике частота выходных импульсов не может исчисляться гигагерцами. Обычно выходная частота ограничена значением около 500 кГц. Да и не всякий контроллер “скушает” такую частоту. Делаем вывод: энкодер с разрешением 1000 имп/оборот (наиболее распространенный) не может крутиться с частотой выше 500 Гц или 30000 об/мин. Но такие скорости в механике я лично не встречал. Делаем второй вывод: высокое разрешение не всегда хорошо.
UPD 18 мая 2022: Вот, что написал по этому поводу читатель в группе ВК СамЭлектрик.ру: Если надо частоту меньше: энкодеры (не все) имеют выход нулевой точки Z – один короткий импульс на оборот. Если нужно разрешение больше – у энкодера два сигнала А и В, сдвинутых на четверть периода, по этому сдвигу определяется направление вращения. Многие ПЛК и некоторые приводы имеют квадратурные счетчики, позволяющие работать с обоими сигналами и даже по обоим фронтам, для тысячника это 2000 и 4000 отсчетов за оборот соответственно.
Пример, поясняющий работу энкодера:

Конструкция, поясняющая работу оптического энкодера
На фото – не энкодер, но данная конструкция в первом приближении прекрасно иллюстрирует работу и устройство инкрементального оптического энкодера. Про щелевой оптический датчик я писал в статье про оптические датчики, там подробнее.
Бич подобных конструкций – при механической поломке, связанной со смещением диска (или другого активатора), датчик легко ломается… В энкодере такого не может быть – там всё надёжно закреплено и защищено.
Основной минус инкрементального энкодера – необходимость непрерывной обработки его выходного сигнала. Кроме того, чтобы узнать положение инкрементального энкодера после подачи на него питания, необходимо провести инициализацию для поиска нуль-метки (что это такое – расскажу позже) либо для поиска нулевого положения механизма.
Абсолютный энкодер имеет более сложное устройство, но он позволяет определить угол поворота в любой момент времени, даже в неподвижном состоянии механизма сразу после включения питания. Говоря простыми словами, выходной сигнал у него – это параллельный код (например, 8-разрядный, имеющий 256 значений), который соответствует углу поворота. Соответствующую конфигурацию имеют и прорези в диске энкодера.
Абсолютные энкодеры работают в сложном оборудовании – там, где в любой момент времени (в том числе, в момент подачи питания) нужно знать точное положение объекта. Но сейчас, с появлением дешевых контроллеров с энергонезависимой памятью, в 99% используются инкрементальные энкодеры. Тем более учитывая, что их цена в несколько раз ниже, чем у абсолютных. Да и обрабатывать последовательные импульсы гораздо проще, чем параллельный код.
Использовать абсолютный энкодер для определения скорости вращения – всё равно, что использовать мощный настольный компьютер только для прослушивания музыки в ВК.
Бывают энкодеры не оптического принципа работы. Но я про них ничего рассказывать не буду, поскольку не имел с ними дела..
Подключение энкодера
Энкодер никогда не работает сам по себе. Он всегда подключается к устройству обработки сигналов, с помощью которого можно переварить и проанализировать импульсы на его выходах. Подключить энкодер легко – ведь это фактически датчик с транзисторными выходами. В простейшем случае, выход энкодера можно подключить ко входу счетчика, и запрограммировать его на измерение скорости или длины.
Но чаще всего выходные сигналы энкодера обрабатываются в контроллере. А далее путем расчетов можно получить информацию о скорости, направлении вращения, ускорении, положении объекта.
Энкодеры подключают не только к контроллеру. Он также может подключаться к преобразователю частоты, питающему электродвигатель. Таким образом , появляется возможность точного позиционирования, а также поддержания нужной скорости и момента вращения двигателя без использования контроллера. Это называется векторным управлением.
Сигналы и выходы инкрементального энкодера
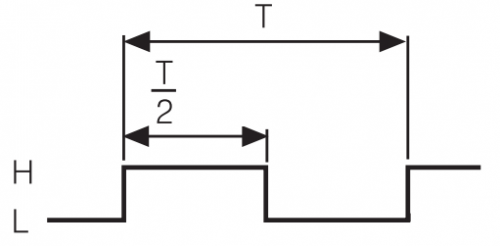
Импульсы на выходе энкодера – один канал
Период Т – величина, обратная частоте, а про частоту мы говорили выше. Уровень “Н” – это напряжение, почти равное напряжению питания (обычно 5, 12, или 24 В). Уровень “L” – около нуля.
Само собой, реальные импульсы не столь идеальны – у них может гулять скважность и будут завалены фронты.
Что может рассказать нам такой энкодер? Только о скорости и погонных метрах. Например, его можно применять для определения частоты вращения двигателя, или длины материала после нажатия кнопки “Сброс”. Неплохо, но хочется большего!
Если будет два выхода, импульсы на которых (оптическим способом) сдвинуты на четверть периода, мы сможем узнать направление вращения:
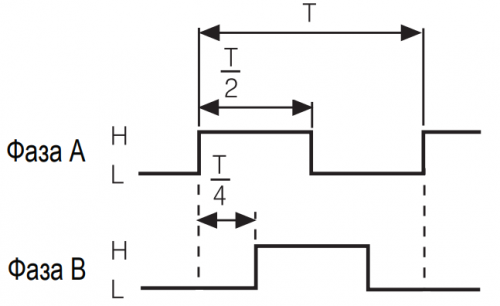
Импульсы каналов А и В с фазовым сдвигом
Такие выходы со сдвигом фаз на четверть периода называются квадратурными каналами. Этот приём широко применяется в радиотехнике и электронике не только для определения направления вращения, но и для определения знака рассогласования частот (больше или меньше опорной частоты?).
Если сдвиг фаз положительный (фаза В отстает), можно условиться о прямом вращении. Если отрицательный (фаза В опережает фазу А на четверть), значит, вращение в обратном направлении. Два этих сигнала с одной частотой и фазой ±90° подаются на триггер, выход которого однозначно указывает о направлении вращения.
Ничего это не напоминает? В энкодере – двухфазная система, со сдвигом фаз 90°, в электрощите – трехфазная система, со сдвигом фаз 120°. Для смены направления вращения трехфазного двигателя достаточно поменять местами любые две фазы.
Со скоростью, расстоянием и направлением разобрались, а что делать, если нужно узнать угол поворота? Для этого вводится сигнал “Z” (Zero) – опорный импульс, который также называют нуль-меткой или референсной меткой:
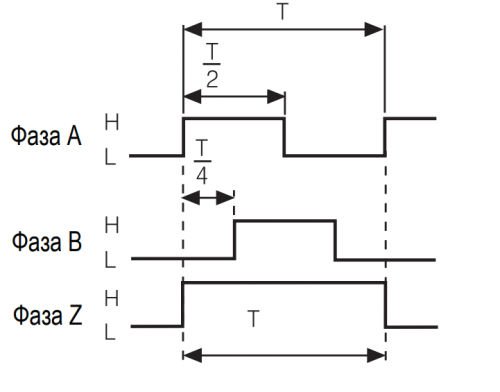
Выходы энкодера А, В с нулевой меткой Z
Импульс “Z” имеет длительность Т (бывает и другая длительность – T/2, или 2Т) и проскакивает 1 раз за оборот вала энкодера. Иными словами, длительность нулевой метки может быть в тысячи раз короче периода вращения вала энкодера.
В современных датчиках каждая фаза (канал) обычно имеет ещё один, противофазный выход.
С теорией заканчиваем, плавно переходим к практике.
Монтаж энкодеров
По монтажу сразу скажу главное – вал энкодера по отношению к валу механизма должен быть надежно зафиксирован! Обычно это делается при помощи шестигранных винтов.
Бывали случаи, когда из-за проскальзывания самодельных и даже штатных муфт глючили производственные линии, и мы долго не могли найти причину – ведь всё остается исправным!
Монтироваться энкодер может и на валу двигателя, и на валу любого другого механизма – это не принципиально, и зависит лишь от конструкции и требований к точности выполнения поставленной задачи.
Вал энкодера никогда не будет соосным с вращающимся валом (вспомните, для чего нужен карданный вал). Поэтому используются специальные заводские переходные муфты, нужно надежно их крепить и периодически проверять качество монтажа.
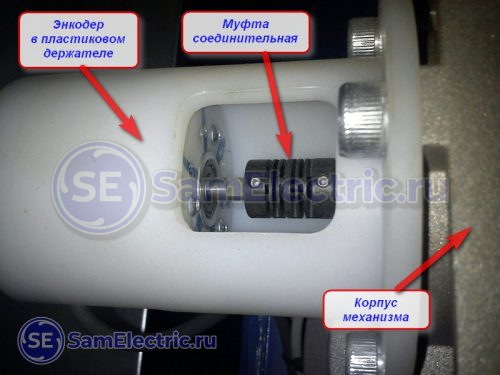
Энкодер механически соединен с приводом через соединительную муфту для компенсации несоосности
Корпус любого энкодера всегда неподвижен. Вращается только его внутренняя подвижная часть.
Существуют энкодеры с полым валом, которые надеваются непосредственно на измеряемый вал и там фиксируются. Там даже нет такого понятия, как несоосность. Их гораздо проще монтировать, и они надежнее в эксплуатации. Чтобы энкодер при этом не прокручивался, используется лишь металлический поводок. На фото ниже показан энкодер с полым валом (обозначен В21.1), надетый на вал редуктора:

Энкодер с полым валом, надет на вал редуктора
Обратите внимание – корпус энкодера целиком и полностью держится на валу редуктора. От проворачивания его держит металлический поводок. При работе энкодер обычно немного покачивается по овальной траектории, это нормально, поскольку идеал существует только на картинках в даташитах и учебниках.
Бывают сквозные полые валы, когда ось механизма проходит через энкодер насквозь.
Подключение и работа энкодеров. Реальные примеры.
Ниже я рассмотрю несколько примеров использования энкодеров в реальном оборудовании.
Измерение скорости полотна
В данном примере, инкрементальный энкодер ELCO используется для измерения скорости бумажного полотна при производстве бумаги. Энкодер закреплен на бумаговедущем валу через муфту, скорость вращения которого однозначно говорит о скорости бумаги.
При помощи системы «энкодер+контроллер» можно вычислить мгновенную скорость, а также погонную длину произведенной продукции.

Энкодер работает на бумаговедущем валу
или другой ракурс:

Энкодер ELCO работает на бумаговедущем валу. Корпус энкодера закреплен жестко, стыковка валов – через компенсирующую муфту
Минус такой установки – при механической поломке вала (а это бывало уже не раз, изнашиваются подшипники) ломается либо муфта, либо сам энкодер.
Положение деталей на конвейере
В этом случае энкодер насажен на вал двигателя, подключенного через преобразователь частоты. Двигатель через редуктор передает движение на конвейер, по которому движутся заготовки деталей.

Положение детали на конвейере, позиционирование при помощи энкодера на двигателе
С помощью энкодера и оптических датчиков, фиксирующих просвет между образцами продукции, контроллер с большой точность может управлять обработкой деталей.
При этом направление знать не обязательно (оно всегда одно), и могут применяться энкодеры без ноль-метки:

Энкодер для определения только скорости вращения
По моему мнению, насаживание энкодера на вал двигателя – не очень хорошая идея в смысле того, что энкодер крутится на больших оборотах (до 3000 об/мин). Кроме повышенного механического износа, необходимо предусмотреть обработку сигналов со сравнительно высокой скоростью. Но сегодня, с развитием промышленной электроники, это не проблема.
Крепление энкодера на валу двигателя позволяет очень точно контролировать скорость привода. С появлением высокооборотистых энкодеров многие производители наладили выпуск двигателей со встроенным энкодером.
Если интересно применение ПЧ в конвейерах, вот моя статья на Дзене, где я подробно рассматриваю схему включения ПЧ для конвейера.
Ещё пример точного позиционирования при помощи энкодера для двигателя:

Энкодер – работа на валу двигателя со стороны крыльчатки
В этом случае двигатель приводит в действие цепную передачу лифта, подающего заготовку на обработку. Точность позиционирования лифта – порядка 1 мм, длина пути – более 2 м.
Перемещение детали
Ещё большую точность, чем в предыдущем случае, можно получить, если вал энкодера закрепить на ходовой винт с резьбой.

На фото сверху вниз – направляющая, ходовой винт, кабель к энкодеру
Если на ходовой винт закрепить гайку, которая механически скреплена с перемещаемой деталью (в реальном примере это – металлическая заготовка, которая рубится или гнётся по нужному размеру), то с помощью энкодера можно до долей миллиметра узнать её положение. Точность вычисления будет зависеть от шага резьбы и разрешающей способности энкодера.
Минус такого решения – при большой скорости возможен «промах», и нужно либо уменьшать скорость при приближении к цели, либо постоянно двигаться на низкой скорости. Кроме того, механика тоже должна быть точной, чтобы исключить любые люфты и перекосы.
Перемещение упора
Задача стоит в принципе такая же, как и в предыдущем случае. Но тут другой принцип перемещения – за счет зубчатой передачи:

Зубчатая передача перемещения каретки
Плюс данной реализации в том, что энкодер насажен непосредственно на зубчатое колесо, которое осуществляет передачу вращения. При большом разрешении энкодера и отсутствии механических люфтов можно добиться очень высокой точности позиционирования.
Использование энкодера совместно с винтовой и зубчатой передачей позволяет достичь высокой точности обработки деталей в станках с ЧПУ.
Вычисление точной координаты
В производстве полиграфической продукции иногда нужно нанести клей (или краску) в точное место. Когда печатная продукция (например, коробки или конверты) движутся по ленточному конвейеру, при помощи оптического датчика определяется начало коробки, затем контроллер при помощи энкодера вычисляет нужную координату, и включает подачу клея.

Вычисление точной координаты при помощи измерительного колеса
Формируется клеевая дорожка нужной длины, затем клей выключается. Далее коробка подается на фальцовочный узел, где складывается и склеивается. При этом скорость работы линии может достигать до 300 коробок в минуту.
Системы дозирования
Для точного открытия заслонки в системе дозирования жидкостей служит система, состоящая из двигателя с редуктором, на вал которого с одной стороны закреплена задвижка, с другой – энкодер.

Поворот на определенный угол при помощи энкодера
Поворот вала редуктора на угол не более 180° ограничен индуктивными датчиками приближения, а точное положение определяется по сигналу от энкодера. В исходном состоянии задвижка закрыта, и датчик минимального положения активен. Это состояние принимается за ноль. Далее включается двигатель, и вал поворачивается. Точный угол поворота пропорционален количеству импульсов от энкодера обратной связи. В данном случае энкодер не делает полный оборот, его движение ограничено датчиками.
Датчики активируются кулачками, которые закреплены (и могут корректироваться шаловливыми ручками)) на том же валу, что и энкодер.
При выключении питания положение энкодера (а значит, и задвижки) запоминается в памяти контроллера. В случае необходимости оператор может провести инициализацию (установку нулевого и максимального положения) за счет индуктивных датчиков. Опорная “Z” – метка при этом не используется.
Защита двигателя
Даже при перегрузке двигателя его скорость понижается, скольжение есть всегда, даже на холостом ходу. Но изменение тока при этом ничтожно. Особенно (например), если двигатель работает на застрявшую продукцию через редуктор.
Поэтому, очень удобно использовать энкодер, закрепленный на валу двигателя, для определения повышенного скольжения. А значит – перегрузки двигателя.
У меня на Дзене есть статья, как энкодер защищает двигатель от перегрузки, там тема раскрыта подробнее.
Вот фото оттуда:

Энкодер, механическая поломка из-за смещения двигателя
Энкодер перестал выдавать импульсы (перегрузки, правда, не было), и тут же контроллер выдал сообщение:
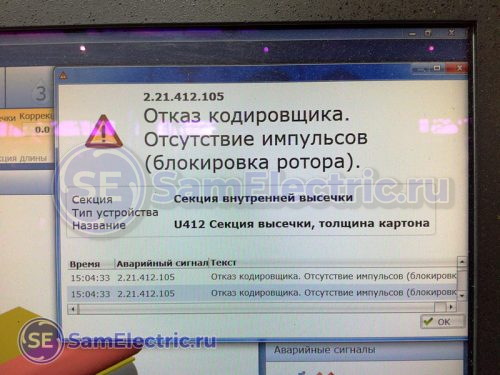
Сообщение на экране оператора о поломке энкодера
Запоминающие энкодеры
Энкодеры умнеют на глазах. В американской линии довелось иметь дело с серводвигателем, в состав которого входит энкодер с памятью.

Энкодер в составе серводвигателя с памятью
Энкодер не простой – у него в памяти зашиты параметры серводвигателя (их более сотни), которые он каждый раз при включении питания передает к центральный контроллер. Из-за заводского брака энкодер был плохо закреплён, и начал тереться о корпус двигателя, что привело к нарушению синфазности вращения двигателя и энкодера. Американцы дистанционно заново программировали этот энкодер, чтобы можно было запустить линию. Но это уже совсем другая история…
Резольвер
Совсем коротко о резольвере. По сути он выполняет те же функции, что и энкодер – может вычислять скорость и направление вращения двигателя. Но резольвер – аналоговый измерительный прибор. В некоторых случаях он гораздо точнее говорит об угле поворота, поскольку фактически речь идет о вычислении сдвига фаз на его выходах.
Реальный японский резольвер SMARTSYN TAMAGAWA SEIKI MODEL: TS2651N141E78, довелось когда-то ремонтировать:

Тахогенератор
Не путайте энкодер и тахогенератор (его иногда ошибочно называют тахометром)!
У них схожие функции и область применения, но у тахо от скорости вращения двигателя зависит не частота выходных импульсов, а выходное напряжение.
Посмотрите, какая конструкция установлена у нас на заводе на двигателе постоянного тока мощностью 200 кВт:

Энкодер + тахометр слиты в единое целое на валу двигателя
Тахогенераторы, как и двигатели постоянного тока, в современном оборудовании практически не используются.
Производители энкодеров
Среди российских производителей энкодеров мне известен лишь только Питерский СКБ ИС, который производит энкодеры марки ЛИР. К сожалению, российского промышленного оборудования сейчас почти не производится, и ЛИРы применяются лишь в военном и лабораторном оборудовании.
По этой причине я имею дело только с энкодерами зарубежного производства. Производителей энкодеров много – их производят почти все производители полупроводниковых датчиков. Чаще всего я встречаюсь с энкодерами Autonics – как и в случае с датчиками, в России представлен большой ассортимент. Другие известные мне производители энкодеров – немецкий Sick, японский Omron, и несколько китайских брендов.
Использование тех или иных марок энкодеров обусловлено часто не техническими причинами, поскольку их параметры, схемы подключения и надежность практически идентичны. Тут скорее политические мотивы – производители комплектующих любыми путями стараются, чтобы их продукция вошла в состав больших и массовых производственных линий, чтобы таким образом закрепиться на рынке.
Скачать
Статья, которую вы сейчас прочитали, недавно была в урезанном виде опубликована в бумажном журнале “Электротехнический рынок” под названием “Энкодер: мастхэв производственной линии”. Кому интересно, выкладываю для скачивания:
• Энкодер: мастхэв производственной линии / Статья в журнале «Электротехнический рынок» от СамЭлектрик.ру. Разновидности и примеры реального применения энкодеров. Приведены описания реальных узлов оборудования, в которых применяются энкодеры, pdf, 1.15 MB, скачан: 1517 раз./
Рекомендую скачать ещё одну интересную статью по энкодерам:
• Подключение инкрементного энкодера к ПЛК / Обобщены данные о типах выходного сигнала энкодера, способах его обработки, подсчёте измеряемой частоты вращения. Пример подключения и обработки сигналов энкодера в контроллере Siemens, pdf, 2.36 MB, скачан: 1670 раз./
Приглашаю коллег к обсуждению в комментариях, буду рад замечаниям и дополнениям к статье!
Что такое энкодер: типы и принцип работы
О том, что это устройство требуется для самых разных производственных задач, знают многие. При этом далеко не все четко понимают, как работает энкодер, что он собой представляет, для чего нужен энкодер и из чего состоит. Настоящая статья — небольшой ликбез на эту тему в вольном изложении. Надеемся, она кому-то окажется полезной. Начнем с матчасти.
Что такое энкодер?
Энкодер, также известный как датчик угла поворота и преобразователь угловых перемещений, — это специальное устройство для точного измерения характеристик вращающихся объектов (например, вала двигателя). Он регистрирует нужные параметры и формирует электрические сигналы, содержащие необходимую информацию.
Нужные параметры — это угол поворота вала, скорость его вращения, направление движения и местоположение вращаемой детали относительно базовой позиции. Подобные устройства требуются в самых разных направлениях производства, где нужны высокоточные измерения. Например, в машиностроении и робототехнике.
Применение энкодеров
Чаще всего их применяют в следующих сферах:
- Производство станков — направление специализированных предприятий, которые производят разнообразные станки и оборудование для металлообработки, запасные части и комплектующие к ним.
- Системы точного перемещения — технические решения, обеспечивающие высокоточное позиционирование. Такие системы могут быть как с ручным приводом, так и с линейным двигателем.
- Производство измерительного оборудования — контрольно-измерительных приборов, блоков преобразования сигналов, арматуры для датчиков давления и температуры и многого другого.
Также в некоторых сферах требуются высокопроизводительные датчики угла поворота, рассчитанные на эксплуатацию при высоких температурах и устойчивые к взрывам. Кроме перечисленных направлений, назначение энкодера может быть и иным:
- типография — энкодеры закрепляют на валах, по которым перемещается материал для печати (бумага, виниловая пленка, баннерная ткань и т. д.);
- автомобильная промышленность — для определения точного угла поворота колес или взаимодействия с двигателями;
- в производстве химических средств — для оборудования, обеспечивающего автоматизированную фасовку.
Типы энкодеров
По принципу работы, конструкции и форме выдаваемого сигнала преобразователи угловых перемещений делятся на два основных вида — инкрементальные (также называемые инкрементные) и абсолютные. Давайте разберем виды энкодеров и их ключевые особенности.
Инкрементальный энкодер
У такого энкодера принцип работы самый простой, как правило, его функциональных возможностей достаточно для большинства задач. Устройство представляет собой диск с прорезями. При вращении его просвечивает оптический датчик, который активируется или деактивируется в зависимости от того, в каком положении он находится относительно прорези.
По сути, устройство неспособно определить местоположение ручки, оно знает лишь направление, а количество делений поворота фиксирует контроллер. Результат работы такого преобразователя угловых перемещений — последовательность цифровых сигналов частоты, зависящей от его разрешения и частоты вращения.
Самый распространенный пример инкрементального энкодера в быту — это регулятор громкости акустической системы с цифровым управлением. Его отличает наличие шкалы с конкретными значениями, например, от 0 до 10. Другой пример — навигация по разнообразным меню.
Главные плюсы инкрементального энкодера — доступная цена, достаточная для большинства задач функциональность и легкость обработки сигналов (последовательных импульсов). В минусы устройства обычно записывают необходимость этой самой обработки выходных сигналов в постоянном режиме, а также инициализации для поиска нуль-метки или нулевого положения механизма.
Абсолютный энкодер
Такой преобразователь угловых перемещений лишен недостатков, характерных для инкрементальных устройств. Диск разбит на секторы одинакового размера, а выходной сигнал соответствует текущему углу поворота. Благодаря такой конструкции устройство фиксирует значение угла в любой момент времени, даже если механизм неподвижен. Присоединять систему отсчета датчика к определенному нулевому значению не нужно.
Более точный принцип действия энкодера абсолютного типа требуется далеко не всегда. В основном такие устройства приобретают для сложного оборудования, когда возможность знать точное позиционирование объекта в любой момент времени является критически важной. Недостатки таких преобразователей:
- они в несколько раз дороже инкрементальных;
- их выходной сигнал (параллельный код) сложнее обрабатывать.
Отличия энкодеров абсолютного типа тоже есть, они бывают однооборотными и многооборотными. Эта характеристика определяет сферу их эксплуатации. Однооборотные модели, как правило, применяют для измерения углов поворота. Они регистрируют абсолютное значение после одного совершенного оборота, затем код приводится в начальное значение.
Многооборотные модели, в свою очередь, снабжены дополнительным передаточным механизмом, с которым устройство также фиксирует количество оборотов. Такие энкодеры требуются для систем с линейным перемещением.
Оптический энкодер
По конструкции и принципу работы это устройство схоже с инкрементальным. Прибор представляет собой стеклянный диск, прочно зафиксированный на валу. Оптический датчик поворота преобразует момент вращения в поток света, принимаемый фоточувствительным датчиком.
Каждому положению диска этого устройства соответствует свой цифровой код. Вместе с количеством оборотов он представляет собой одну единицу измерения энкодера. Оптические преобразователи угловых перемещений бывают двух типов:
- Магнитные. При вращении вала они фиксируют прохождение полюса магнита, который расположен возле чувствительного элемента. Сигналы передаются в цифровой форме. Плюсы этого варианта — простая конструкция, меньше требований к условиям эксплуатации и более доступная стоимость.
- Фотоэлектрические. Эти устройства используют фотоэлектрический эффект, который вызывает попадание света на датчик и его преобразование в сигнал электрического тока. Фотоэлектрические энкодеры отличаются высокой чувствительностью, при этом обладают хорошей точностью.
Механический энкодер
В сравнении с перечисленными выше вариантами такое устройство можно назвать устаревшим, поскольку оно передает аналоговый сигнал. Материалом для изготовления диска служит диэлектрик с выпуклыми либо непрозрачными участками. Наличие контактов и переключателей делает возможным расчет значения абсолютного угла.
Главный минус механических энкодеров — их низкая надежность. Неизбежное разбалтывание контактов приводит к искажению сигнала и, соответственно, неверным или как минимум недостаточно точным показаниям. Ни один из более современных вариантов не имеет такого недостатка.
Есть и другие, менее известные энкодеры, устройство и принцип работы их могут отличаться от рассмотренных выше. Как правило, они менее распространены, поскольку имеют более существенные недостатки при отсутствии видимых преимуществ.
Подключение энкодера
Прежде всего важно понимать, что энкодер любого типа лишь формирует сигналы, на этом его функциональная роль заканчивается. Он передает их другому устройству для последующей обработки. Это может быть не только контроллер но и, например, счетчик, запрограммированный на измерение заданных параметров (в первую очередь — скорости).
Также энкодер подключают к преобразователям частоты, обеспечивающим питание электродвигателя. В этом случае появляется возможность точно позиционировать устройство и задавать определенную скорость, не используя для этого контроллер (векторное управление). В результате дальнейших расчетов можно получить данные о скорости вращения, его направлении, местоположении вала или другого объекта.
В случае с контроллером для соединения используют нужные выходы, при этом вычислением положения и скорости вала уже занимается программа. Типичный сценарий: энкодер, закрепленный на валу электродвигателя, который движется в сторону другого элемента конструкции. При достижении заданного расстояния между ними первый останавливается во избежание повреждений оборудования.
Физически энкодер в большинстве случаев подключают трех- или шестипроводной схемой, есть и другие варианты соединения. Главным фактором, влияющим на способ подключения датчика, является тип принимающего устройства. Крайне важно:
- не экономить на кабеле — использовать следует только тот, который рекомендован заводом-производителем;
- использовать дополнительный источник питания, если на принимающем устройстве нет клемм для питания датчика;
- не подключать высокоточный энкодер к источникам, используемым для питания реле и других датчиков (чревато помехами и неверными показаниями).
Как выбрать энкодер
Теперь, когда с матчастью покончено, перейдем к критериям выбора этого устройства. Проще всего, когда его приобретают для разрабатываемой системы — на этой стадии производится комплексный расчет всей инженерной конструкции. Соответственно, датчик подбирают в соответствии с конкретными требованиями технического задания.
Также бывают ситуации, когда этот прибор вышел из строя или стал работать нестабильно, оказался недостаточно надежен, дорог в обслуживании и т. д.
В первом случае — когда речь только о поломке — достаточно переписать маркировочные данные на корпусе энкодера и подобрать устройство с такими же характеристиками. Во втором случае — если необходимо приобрести прибор с другими параметрами — лучше всего обратиться к специалистам по подбору такого оборудования.
В общем случае при выборе энкодера принимают во внимание следующие факторы:
- Местоположение монтажа устройства. Важно заранее понимать, где оно будет устанавливаться, — внутри помещения или на улице. Во втором случае может понадобиться защита от влаги и посторонних мелких предметов (IP).
- Тип энкодера. Как правило, выбор лежит между инкрементальным, абсолютным или магнитным датчиком. Здесь нет никакого смысла приобретать в несколько раз более дорогой вариант с функциональностью, которая никогда не будет задействована.
- Тип выходного сигнала. Бывают ситуации, когда этот параметр играет очень важную роль в силу особенностей дальнейшей обработки информации. Здесь только специалист сможет сказать, какой конкретно сигнал ему нужен.
- Разрядность/разрешение. По сути, это количество создаваемых импульсов на один оборот диска. В зависимости от модели, эта характеристика может иметь значение от 1 до 5000 импульсов за оборот.
Последнюю характеристику — разрешение — рассмотрим более детально. Ее выбирают, отталкиваясь от скорости вращения вала электродвигателя — программная часть энкодера должна успевать генерировать сигналы. Важно заранее убедиться в том, что паспортное разрешение датчика соответствует частоте вращения вала исполнительного органа.
Обратим внимание на один очень существенный момент. Нет никакого смысла приобретать энкодер с более высоким значением разрядности, если контроллер или иное устройство, принимающее сигнал, не будет успевать считать все импульсы. В этом случае скорость и другие параметры могут быть рассчитаны неверно, точность будет низкой.
Более правильно начать вопрос выбора устройства и работы энкодера с количества импульсов на оборот диска, которого достаточно, чтобы обеспечить нужную точность. В случае с электродвигателем с асинхронным короткозамкнутым ротором выбранная разрядность будет определять поведение системы.
Если эта характеристика очень мала, то вал мотора может двигаться с рывками. Также система может работать некорректно при удержании вала на нулевой скорости. Точно же предсказать, как в этом случае будет вести себя мотор, невозможно, не зная логики работы привода. Самый доступный способ подобрать подходящий вариант — проверять, как работает система при разных комбинациях привода, электромотора и энкодера.
По всем вопросам, связанным с энкодерами, их обслуживанием и ремонтом, вы можете обратиться в инженерную компанию 555. Звоните по любому телефону, чтобы выяснить все интересующие вопросы.
Цифровые энкодеры для лифтовых двигателей
В настоящий момент в лифтовой отрасли преобладающее значение имеют безредукторные системы (рис. 1). Для новых проектов, а также для модернизации предпочтение отдается системам с прямым приводом. Такие аргументы как компактная конструкция, значительная мощность, простота эксплуатации и высокая энергоэффективность являются основополагающими для покупателей, выбирающими между различными типами лифтовых систем. Кроме того, в некоторых сегментах рынка решение принимается на основании таких факторов, как комфорт и плавность движения. Для полноценного удовлетворения всех указанных требований к лифтам необходима высокопроизводительная система, состоящая из устройства управления и двигателя.
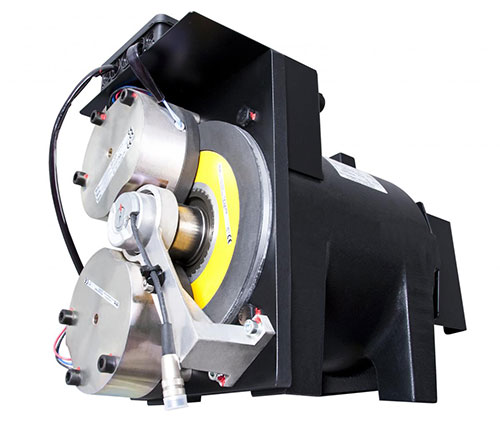
Рис. 1.
Составной частью данной системы является соответствующий энкодер (устройство обеспечения обратной связи), предоставляющий данные о положении с использованием которых устройство управления может оценить фактическую скорость вращения вала двигателя, а в двигателях с постоянными магнитами выполнять коммутацию обмотки в нужной фазе. Энкодеры с коммутацией и абсолютные энкодеры от компании HEIDENHAIN играют в данном вопросе ключевую роль.

Рис. 2.
В частности, это касается выбора абсолютного энкодера модели ECN 425 (рис. 2). Энкодер ECN 425 обладает внушительным разрешением в 25 бит на оборот, а также впечатляющей точностью (рис. 3), что позволяет достигать разрешения, требуемого для высококлассного привода с обратной связью. Указанные 33 554 432 уникальных положений на один оборот достигаются в результате оптимального сканирования шкалы с 2 048 штрихами, далее следует 14-битная интерполяция сигналов специальной электроникой. Все это позволяет контроллеру получать полную информацию о положении с тактовой частотой 8 МГц, достаточной для обеспечения динамического управления двигателем. При этом пассажиры практически не замечают движения кабины, что в свою очередь позволяет производителям лифтового оборудования расширить возможности ускорения и замедления, например, быстрые старты.
Энкодер ECN 425 от компании HEIDENHAIN обладает и другими впечатляющими функциями.
Задание необходимого положения (например, обнуление) с использованием двунаправленного последовательного интерфейса EnDat 2.2 позволяет системе управления просто и эффективно обеспечивать коммутацию при необходимой фазе относительно магнитного поля двигателя для обеспечения оптимального крутящего момента. Благодаря высокому разрешению энкодера возможно его использование практически с любым числом пар полюсов двигателя. Это означает, что для применения в различных конструкциях двигателя требуется всего один энкодер.
Двунаправленный интерфейс также обеспечивает коммутационную связь между двигателем и системой управления.
Во-первых, становится возможным передача параметров энкодера и предварительно заданных характеристик двигателя. Во время загрузки системы управления эти данные могут быть переданы в нее из ЭСППЗУ энкодера. Это позволяет сократить время пусконаладочных работ и избежать ошибок ручного ввода при параметризации системы.
Во-вторых, интерфейс поддерживает функции мониторинга, позволяющие обеспечить высокую степень готовности лифта. Новейшая электроника, применяемая в энкодере, делает возможным обмен данными с температурным сенсором. Для дальнейшей обработки данные о температуре могут быть переданы с использованием интерфейса EnDat 2.2 в последующую электронику. Кроме того, значения параметров диагностики, полученные в электронике энкодера, могут быть использованы для оценки состояния и резерва работоспособности энкодера. В случае получения критических значений выполняются предупредительные меры, позволяющие избежать незапланированных простоев лифта.
Совместно со стандартными действиями по обеспечению высокой надежности передачи данных, основанной на циклическом контроле с избыточностью (CRC) и заданных источниках сигналов предупреждений и тревог, энкодер модели ECN 425 обеспечивает высокий уровень самоконтроля и диагностики. Высокие скорости вращения вала (до 15 000 об/мин) и максимальная рабочая температура в +100°C указывают на возможность применения данной модели энкодера в сложных задачах из области электроприводной техники.
Новая система полностью цифровой последовательной передачи данных для энкодеров зарекомендовала себя как чрезвычайно устойчивая к электромагнитным помехам, так как надежность бита передаваемой информации в двухтактном режиме (RS 485) очень высока. Так как интерполяция сигналов происходит непосредственно в энкодере, то для его использования требуется кабель с одним экраном и с 6–8 жилами. Напряжение питания энкодера модели ECN 425 лежит в диапазоне от +3,6 до +14 В, что исключает необходимость использования оборудования для контроля падения напряжения на больших длинах кабеля.

Рис. 3.
Механическое крепление энкодера может быть адаптировано для конкретного лифтового двигателя. Существует два базовых исполнения коническим валом. Возможен вариант жесткого крепления — оптимизированный для динамической обратной связи — с использованием статорной муфты в виде разжимного кольца, или статорной муфты для плоских поверхностей, не предъявляющих жестких требований к допускам на установку и радиальному биению вала. Энкодер поставляется в сборе с соединительным кабелем и обладает степенью защиты IP 64 по EN 60529.
Заключение
Энкодеры с внутренней интерполяцией и двунаправленным последовательным интерфейсом обладают широким функционалом, который полностью удовлетворяет требованиям систем управления лифтами. Возможность передачи абсолютного цифрового положения с высоким разрешением в кратчайшие промежутки времени, а также универсальная технология подключения и установки обеспечивают оптимизацию системы привода. Система мониторинга с использованием внутренней диагностики позволяет воспользоваться преимуществами предупредительного обслуживания. Различные механические исполнения также обеспечивают широкие установочные допуски и позволяют подбирать энкодер под конкретную задачу.
Ознакомиться с полным ассортиментом продукции компании HEIDENHAIN и проконсультироваться по вопросам ее применения и использования Вы сможете на выставке «Металлообработка-2014» (16–20 июня 2014, г. Москва, ЦВК «Экспоцентр») — наш стенд 21E65 в павильоне 2.1.