Двигатель и привод — в чем разница?
Очень важно понимать разницу между двигателями и приводами. Двигатель (мотор) — это механическое или электрическое устройство, генерирующее вращательное или линейное усилие, используемое для движения механизмов. К двигателю обычно также прилагается устройство управления, называемое драйвер — это электронное устройство, управляющее электрической энергией, передаваемой мотору. Драйвер обеспечивает двигатель электроэнергией различной амплитуды и частоты, косвенно управляя скоростью и крутящим моментом мотора.
Существуют две основные разновидности управляющих устройств: стандартный инвертор (преобразователь частоты) с управлением только частотой вращения и крутящим моментом, и серводрайвер (сервоусилитель) с управлением не только частотой вращения и крутящим моментом, но и позиционированием компонентов оборудования при выполнении операций, требующих сложного движения узлов механизма. В отдельных случаях на мотор в ЧРП можно установить энкодер, и создать систему с обратной связью по положению, получив опять же сервопривод.
Устройство управления вместе с мотором и образуют узел, называемый «привод».
Электропривод и электродвигатель в чем разница
Определение и понятие электропривода. Типы электроприводов и элементы электропривода.
В настоящее время основным средством привидения в движение рабочей машины является электрический двигатель. Почти вся механическая энергия, используемая промышленностью и в сельском хозяйстве производиться с помощью электромеханических устройств, питание которых осуществляется от источника электрической энергии.
В задачу электромеханических устройств входит управление механическим потоком мощности, производимый механизмами и машинами, которые реализованы электрическим способом, с помощью электропривода.
Электроприводом называют электромеханическое устройство по средством которого осуществляется движение рабочих органов механизмов, а целом реализуется электрификация и автоматизация рабочих процессов. Следует отметить, что электропривод является главным потребителем электроэнергии в развитых странах. На долю электропривода приходиться свыше 60% всей вырабатываемой электроэнергии.
Электроприводы различны по своим характеристикам. Отличаются по мощности, скорости вращения, конструктивным исполнением и т.д.
Так мощность крупных прокатных станов, компрессоров, и т.д. доходит до нескольких тысяч кВт. Мощность электроприводов в приборостроении и установках автоматики составляет несколько Вт, мощность бытовых приборов – 0,25 кВт 100 кВт.
Диапазон скоростей от 10 долей оборотов в минуту до 100 тысяч и более оборотов в минуту.
Развитие электроприводов связано с переходом от интенсивного развития производства к более эффективному ее использованию.
Использование автоматизированного регулирования электроприводов позволяет оптимизировать технологические процессы с целью сокращения их энергоемкости.
Электропривод представляет из себя устройство, включающее комплекс электрических машин, электрических аппаратов, преобразователей, усилителей и информационного устройства. Механические элементы необходимы для передачи движения от двигателя к исполнительному механизму и управления им.
Структурная схема электропривода имеет вид:
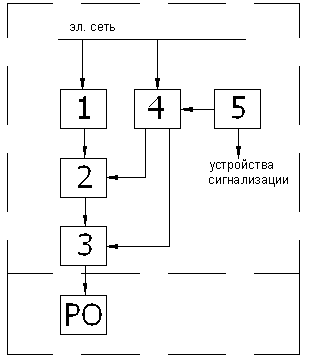
передающее устройство (преобразовательный механизм);
РО рабочий орган машины.
Преобразовательное устройство служит для преобразования электрической энергии. Оно необходимо для целенаправленного и экономичного изменения параметров движения электропривода, а именно скорости, момента, ускорения и т.д. К электрическим преобразовательным устройствам относиться управляемые выпрямители, преобразователи частоты, машины. В нерегулируемом электроприводе отсутствует преобразователь, кроме случая когда необходимо запитывать двигатель постоянного тока от сети переменного тока. Электрическое преобразовательное устройство обычно представляет собой преобразователь, выполненный на силовых полупроводниковых приборах (диодах, тиристорах, запирающих тиристорах, силовых транзисторах, биполярных транзисторах с изолированным входом IDBT).
К электродвигательному устройству относятся электродвигатели различного типа: двигатель постоянного тока (независимого, последовательного, смешанного возбуждения), асинхронные и синхронные двигатели, коллектор, линейные и шаговые двигатели.
Передающее устройство – это редукторы, различного рода муфты, цепные и ременные передачи. Для высокоточных механизмов и для машин работающих в динамическом режиме, стремятся исключить динамические передачи между валом двигателя и рабочим органом механизма. Такие электроприводы называют безредукторными, при этом возрастают габариты и масса приводного двигателя, поскольку эти параметры при одной и той же мощности обратно-пропорциональны номинальной скорости электродвигателя.
Система управления – это часть электропривода, обеспечивающая ему статические и динамические свойства. К управляющим устройствам относятся функционально связанные электрические аппараты защиты и управления, редукторы тока и скорости, построенные на типовых аналоговых и цифровых модулях или микроконтроллерах. Сюда можно отнести усилитель сигнала модуля управления.
Информационное устройство служит для сбора, обработки и передачи информации о работе управляемого объекта. К ним относят различного рода датчики скорости, температуры, микроконтроллеры и т.д. Важной функцией информационно-управляющей структуры является реализация технологического процесса с минимальными затратами электрической энергии.
Электрический привод
Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса.
Современный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %) [1] и главным источником механической энергии в промышленности.
Определение по ГОСТу Р 50369-92 [2] Электропривод — электромеханическая система, состоящая из преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса.
Как видно из определения, исполнительный орган в состав привода не входит. Однако, авторы авторитетных учебников [1] [3] включают исполнительный орган в состав электропривода. Это противоречие объясняется тем, что при проектировании электропривода необходимо учитывать величину и характер изменения механической нагрузки на валу электродвигателя, которые определяются параметрами исполнительного органа. При невозможности реализации прямого привода электродвигатель приводит исполнительный орган в движение через кинематическую передачу. КПД, передаточное число и пульсации, вносимые кинематической передачей также учитываются при проектировании электропривода.
Содержание
Функциональная схема
- Регулятор (Р) предназначен для управления процессами, протекающими в электроприводе.
- Электрический преобразователь (ЭП) предназначен для преобразования электрической энергии сети в регулируемое напряжение постоянного или переменного тока.
- Электромеханический преобразователь (ЭМП) — двигатель, предназначен для преобразования электрической энергии в механическую.
- Механический преобразователь (МП) может изменять скорость вращения двигателя, а также характер движения (с поступательного на вращательное или с вращательного на поступательное).
- Упр — управляющее воздействие.
- ИО — исполнительный орган.
- Силовая часть или электропривод с разомкнутой системой регулирования.
- Механическая часть. электропривода.
Характеристики привода
Статические характеристики
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Механическая характеристика
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода. [1]
Электромеханическая характеристика двигателя
Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
Динамическая характеристика
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.
Классификация электроприводов [4]
По количеству и связи исполнительных, рабочих органов.
- Индивидуальный, в котором рабочий исполнительный орган приводится одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления.
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения.
- ЭП с вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства.
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока.
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций.
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
Алгоритм выбора электропривода
Для некоторых механизмов, работающих в повторно-кратковременном режиме (краны, лифты), большую часть рабочего цикла двигатель работает на естественной характеристике и только относительно небольшое время работает на искусственной характеристике, обычно на пониженной частоте вращения. В этом случае потери электроэнергии на искусственной характеристике сравнительно невелики, так как мало время работы на ней. Поэтому здесь можно применять простые и дешёвые способы регулирования, даже если они вызывают повышенные потери мощности в обмотках. Поэтому, благодаря простоте реализации метода регулирования скорости путём изменения сопротивления в цепи ротора, такие электроприводы нашли наиболее широкое применение в крановых системах, и сейчас составляют основную часть находящихся в эксплуатации и выпускаемых промышленностью электроприводов. В то же время растет число электроприводов с плавным регулированием скорости, в первую очередь к ним относятся электроприводы по системам «тиристорный преобразователь — двигатель постоянного тока» (ТП-Д) и «преобразователь частоты — асинхронный двигатель» (ПЧ-АД).
Основными типами электродвигателей, которые используются для привода производственных механизмов с регулируемой скоростью движения рабочего органа, являются двигатели постоянного тока и асинхронные с короткозамкнутым или фазным ротором. Наиболее просто требуемые искусственные характеристики получаются у двигателей постоянного тока, поэтому до недавнего времени [когда?] они преимущественно и находили применение для регулируемых электроприводов. С другой стороны, асинхронные двигатели, уступая двигателям постоянного тока по возможностям регулирования частоты вращения, по сравнению с последними проще в изготовлении и эксплуатации и имеют относительно меньшие массу, размеры и стоимость. Именно эти отличительные свойства асинхронных двигателей определили их главенствующее использование в промышленном нерегулируемом электроприводе. В настоящее время двигатели постоянного тока вытесняются короткозамкнутыми асинхронными двигателями с преобразователями частоты, а также синхронными двигателями с постоянными магнитами на роторе и шаговыми. Число выпускаемых двигателей постоянного тока составляет лишь 4-5 % числа двигателей переменного тока и неуклонно снижается [источник не указан 632 дня] .
Электропривод и электрические аппараты

Практически все стационарные машины в промышленности и сельском хозяйстве приводятся в действие с помощью электропривода.
Электроприводом называется система, состоящая из электродвигателя, передаточного механизма и аппаратуры управления и защиты и предназначенная для приведения в движение исполнительных органов рабочей машины.
Электродвигатель непосредственно преобразует электрическую энергию в механическую, которая затем передается через передаточное устройство на рабочую машину.
При индивидуальном электроприводе каждая рабочая машина или механизм имеет отдельный электропривод. Электродвигатель может быть установлен отдельно от рабочей машины или непосредственно на ней. Иногда электродвигатель конструктивно объединяют с машиной таким образом, что отсутствует механическая передача, а некоторые части его выполняют функции рабочих органов самой машины. Такой электропривод называется встроенным. Например, ручные дрели, вентиляторы, центрифуги и т. д.
Взаимосвязанный электропривод представляет собой два или несколько электрически или механически связанных электропривода, при работе которых поддерживается заданное соотношение их скоростей вращения. Многодвигательным называется взаимосвязанный электропривод, электродвигатели которого совместно приводят в действие общий вал.
По характеру движения электроприводы бывают непрерывного и дискретного действия, вращательные и линейные, реверсивные и нереверсивные. В зависимости от системы управления электроприводы делят на нерегулируемые, регулируемые, программно управляемые и автоматизированные.
Основные типы электродвигателей, используемых в электроприводе, — двигатель постоянного тока и асинхронный электродвигатель.
ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Электрические машины постоянного тока обратимы, т. е. одна и та же машина может работать и как генератор, и как двигатель. Поэтому устройство генераторов и двигателей постоянного тока одинаково.
Машина постоянного тока состоит из неподвижного корпуса (статора), по внутренней поверхности которого закреплены полюса с обмотками возбуждения, и вращающегося якоря, установленного внутри статора на подшипниках. Якорь собирают из отдельных листов электротехнической стали и напрессовывают на стальной вал, концы которого располагают в подшипниках. Пакет листов сердечника якоря имеет вид цилиндра, по внешнему периметру которого выштампованы пазы. В них уложена обмотка якоря, выполненная изолированным медным проводом. На вал якоря также напрессовывают коллектор, который состоит из медных пластин, изолированных от якоря и друг от друга пластмассой. К пластинам коллектора припаивают провода обмотки якоря. Между вращающимся якорем и неподвижными токоведущими частями статора размещают графитовые щетки, которые обеспечивают контакт с пластинами коллектора.
Обмотка возбуждения, находящаяся на статоре, включается в цепь постоянного тока и создаст постоянное магнитное поле возбуждения.
Принцип действия двигателя основан на известном из курса физики явлении взаимодействия проводника с током и постоянного магнитною поля. Вели поместить рамку из проводника в постоянное магнитное поле и пропустить через нее постоянный электрический ток, то рамка повернется и займет такое положение, при котором ее плоскость станет перпендикулярна силовым линиям магнитного поля. Максимально возможный угол поворота 90°. Если взять несколько рамок, закрепленных на одной оси и сдвинутых в пространстве, и поочередно подавать в них ток, то можно обеспечить непрерывное вращение этой оси. Обмотка якоря выполнена таким образом, что представляет собой достаточно большое количество (40. 100) таких элементарных рамок, начало и конец которых припаяны к соответствующим коллекторным пластинам. При повороте якоря на определенный угол, зависящий от числа пластин коллектора, с помощью щеток происходит переключение с одной рамки на другую. Таким образом и осуществляется вращение якоря.

Рис. 1. Схемы двигателей постоянного тока:
1 — с независимым возбуждением; б — параллельным; в — последовательным; г — смешанным возбуждением
На рисунке 1 показаны основные схемы включения двигателя постоянного тока в сеть: с независимым возбуждением (а), с параллельным возбуждением (б), с последовательным возбуждением (в) и со смешанным возбуждением (г). В зависимости от схемы включения меняются характеристики двигателя.
Преимущество двигателей постоянного тока — возможность регулирования скорости вращения в больших пределах.
Определение понятия «электропривод»
Электрический привод представляет собой электромеханичёское устройство, предназначенное для приведения в движение рабочего органа машины и управления ее технологическим процессом. Он состоит из трех частей: электрического двигателя, осуществляющего электромеханическое преобразование энергии, механической части, передающей механическую энергию рабочему органу машины, и системы управления, обеспечивающей оптимальное по тем или иным критериям управление технологическим процессом. Характеристики двигателя и возможности системы управления определяют производительность механизма, точность выполнения технологических операций, динамические нагрузки механического оборудования и ряд других факторов. С другой стороны, нагрузка механической части привода, условия движения ее связанных масс, точность передач и т. п. оказывают влияние на условия работы двигателя и системы управления, поэтому электрические и механические элементы электропривода образуют единую электромеханическую систему, составные части которой находятся в тесном взаимодействии.
Свойства электромеханической системы оказывают решающее влияние на важнейшие показатели рабочей машины и в значительной мере определяют качество и экономическую эффективность технологических процессов. Развитие автоматизированного электропривода (рисунок 1.1) ведет к совершенствованию конструкций машин, к коренным изменениям технологических процессов, к дальнейшему прогрессу во всех отраслях народного хозяйства.

Рисунок 1.1 — Схема автоматизированного электропривода
Классификация электроприводов
Электроприводы по способам распределения механической энергии можно разделить на три основных типа: групповой электропривод; индивидуальный и взаимосвязанный.
Групповой электропривод обеспечивает движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины. Передача механической энергии от одного двигателя к нескольким рабочим машинам и ее распределение между ними производится с помощью одной или нескольких трансмиссий. Такой групповой привод называют также трансмиссионным (рисунок 2.1).

Рисунок 2.1 — Структурная схема группового трансмиссионного электропривода
Вследствие своего технического несовершенства трансмиссионный электропривод в настоящее время почти не применяется, он уступил место индивидуальному и взаимосвязанному, хотя в ряде случаев еще находит применение и групповой привод по схеме на рисунке 2.2.

Рисунок 2.2 — Структурная схема группового электропривода
Индивидуальный привод по сравнению с трансмиссионным и групповым обладает рядом преимуществ: производственные помещения не загромождаются тяжелыми трансмиссиями и передаточными устройствами; улучшаются условия работы и повышается производительность труда вследствие облегчения управления отдельными механизмами, уменьшения запыленности помещений, лучшего освещения рабочих мест; снижается травматизм обслуживающего персонала. Кроме того, индивидуальный электропривод отличается более высокими энергетическими показателями.
В трансмиссионном приводе при выходе из строя или при ремонте электродвигателя выбывает из работы группа машин, тогда как в случае индивидуального привода или группового по схеме на рисунке 2.2 остановка одного электродвигателя вызывает остановку лишь одной рабочей машины.

Рисунок 2.3 — Индивидуальные электроприводы рабочих органов (шпинделей) продольно-фрезерного станка
Индивидуальный электропривод широко применяется в различных современных машинах, например в сложных металлорежущих станках, в прокатных станах металлургического производства, в подъемно-транспортных машинах, экскаваторах, в роботах-манипуляторах и т. п.
Примером использования индивидуального привода может служить продольно-фрезерный станок (рисунок 2.3), имеющий отдельные электроприводы главных движений (приводы трех шпиндельных бабок).
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой электродвигательных устройства (или электроприводов), при работе которых поддерживается заданное соотношение или равенство скоростей или нагрузок или положение исполнительных органов рабочих машин. Необходимость в таком приводе часто возникает по конструктивным пли технологическим соображениям.
Примером взаимосвязанного электропривода может служить привод цепного конвейера. На рисунке 2.4 показана схема такого привода, рабочим органом которого является цепь, приводимая в движение двумя или несколькими двигателями (М1, М2), расположенными вдоль цепи. Эти двигатели имеют вынужденно одинаковую скорость.
Взаимосвязанный электропривод широко применяется в различных современных машинах и агрегатах, например в копировальных металлорежущих станках и станках с программным управлением, в бумагоделательных машинах, ротационных машинах полиграфического производства, и текстильных агрегатах, в прокатных станах металлургического производства, в поточных технологических линиях но производству шинного корда, синтетических пленок и т. д.

Рисунок 2.4 — Схема взаимосвязанного привода конвейера
По виду движения электроприводы могут обеспечить: вращательное однонаправленное движение, вращательное реверсивное и поступательное реверсивное движения.
Вращательное однонаправленное, а также реверсивное движение осуществляется электродвигателями обычного исполнения. Поступательное движение может быть получено путем использования электродвигателя вращательного движения обычного исполнения совместно с преобразовательным механизмом (кулисным, винтовым, реечным и т. п.) либо применения электродвигателя специального исполнения для поступательного движения (так называемые линейные электродвигатели, магнитогидродинамические двигатели).
По степени управляемости электропривод может быть:
1) нерегулируемый — для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода изменяются только в результате возмущающих воздействий;
2) регулируемый — для сообщения изменяемой пли неизменяемой скорости исполнительному органу машины, параметры привода могут изменяться под воздействием управляющего устройства;
3) программно-управляемый — управляемый в соответствии с заданной программой;
4) следящий — автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с произвольно меняющимся задающим сигналом;
5) адаптивный — автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
Можно классифицировать электроприводы и по роду передаточного устройства. В этом смысле электропривод бывает:
1) редукторный, в котором электродвигатель передает вращательное движение передаточному устройству, содержащему редуктор;
2) безредукторный, в котором осуществляется передача движения от электродвигателя либо непосредственно рабочему органу, либо через передаточное устройство, не содержащее редуктор.
По уровню автоматизации можно различать:
1) неавтоматизированный электропривод, в котором управление ручное; в настоящее время такой привод встречается редко, преимущественно в установках малой мощности бытовой и медицинской техники и т. п.;
2) автоматизированный электропривод, управляемый автоматическим регулированием параметров;
3) автоматический электропривод, в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
Два последних типа электропривода находят применение в подавляющем большинстве случаев.
Наконец, по роду тока применяются электроприводы постоянного и переменного тока.
Типы электродвигателей и электроприводов
Для осуществления различных технологических процессов человеком созданы тысячи самых разнообразных машин и механизмов.
Рабочая машина или механизм состоит из множества взаимосвязанных деталей и узлов. Один из узлов (например, сверло у станка, кабина у лифта и т.д.) непосредственно выполняет заданный технологический процесс или операцию и поэтому называется исполнительным органом (ИО).
Для совершения исполнительным органом технологической операции к нему должна быть подведена определенная механическая энергия от устройства, которое, в соответствии со своим назначением, получило название привода. Привод вырабатывает механическую энергию, преобразуя её из других видов энергии.
Наибольшее применение имеет электрический привод.
Во многом это обусловлено тем, что КПД других типов приводов по сравнению с электроприводом существенно меньше. В самых мощных электрических машинах КПД равен 98—99,5%, а в машинах мощностью 10 Вт КПД составляет 20–40% (что для такой малой мощности довольно высокое значение) [32].
Определение электропривода
Определение электропривода состоит из описания его обобщенной функциональной схемы (рис. 8.1) и его общего назначения.
Рис. 8.1. Обобщенная функциональная схема электропривода
ИЭЭ – источник электрической энергии; ПЭЭ – преобразователь электрической энергии;
ЭД – электродвигатель; МП – механический преобразователь; УУ – управляющее устройство; ЭП – электрический привод; Н – нагрузка
Определение по ГОСТ Р 50369-92 (с небольшой лексической редакцией).
Электропривод – это электромеханическая система, состоящая в общем случае из преобразователей электрической энергии ПЭЭ, электромеханического преобразователя (электродвигателя ЭД), механических преобразователей МП иуправляющих и информационных устройств УУ, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса.
Электропривод – это электромеханическая система, предназначенная для приведения в движение рабочих органов механизма и управления этим движением.
Таким образом, электропривод выполняет две задачи:
— осуществляет преобразование электрической энергии в механическую энергию;
— управляет этим преобразованием в целях реализации заданного технологического процесса.
Электропривод состоит из двух каналов: силового и информационного. По силовому каналу транспортируется преобразуемая электроэнергия, а по информационному – осуществляется управление потоком энергии, а также сбор и обработка сведений о состоянии и функционировании системы, диагностика её неисправностей.
Силовой канал, в свою очередь, делится на электрическую и механическую часть.
Под управлением понимают организацию процесса преобразования энергии, который обеспечивает в статике и динамике нужную характеристику [56].
В общем случае сигналы с датчиков могут поступать в УУ со всех звеньев электропривода, а вырабатываемый сигнал управления, в зависимости от выбранного способа управления, может оказывать воздействие на любой из элементов ЭП.
Как правило, управление ЭП направлено на регулирование таких выходных показателей ЭП, как скорость двигателя и момент на валу.
Если управляющее устройство автоматическое, то электропривод называется автоматизированным [56].
В отдельных случаях в электроприводе могут отсутствовать преобразовательное и передаточное устройства.
Электроприводы являются основными потребителями электроэнергии. В промышленно-развитых странах электроприводы потребляют более 60% всей вырабатываемой электроэнергии [12].
Самыми распространенными агрегатами, которые приводятся во вращение электроприводами, являются насосы, вентиляторы и компрессоры (их доля составляет около 80%) [12].
Компрессор (от лат. compressio — сжатие) – устройство для сжатия и подачи газов под давлением (воздуха, паров хладагента и т.д.). Приводным двигателем в компрессоре может являться электродвигатель, ДВС, паровая или газовая турбина. Если компрессор приводится во вращение от турбины, то он называется турбокомпрессор [16].
По данным ЕС электроприводы массового назначения распределяются по мощности следующим образом: 0,75 кВт — 7,5 кВт – 39%; 7,5 кВт– 75 кВт — 38%; более 75 кВт – 23% [12].
В данном разделе будут рассмотрены типовые структуры электропривода. Отдельные функциональные элементы электропривода рассматриваются: в Разделе 14 (преобразовательные электронные устройства); Разделе 13 (электродвигатели); Разделе 15 (механические преобразователи/передачи).
Типы электродвигателей и электроприводов
Из всего многообразия приводов мы выделим семь типов.
Четыре типа электродвигателей и электроприводов получили свои названия по типу электрической машины.
1) Коллекторный двигатель постоянного тока (КДПТ) – это коллекторная машина постоянного тока, работающая как электродвигатель.
Тип электропривода — электропривод на базе коллекторного двигателя постоянного тока.
2) Асинхронный двигатель (АД) – это асинхронная машина, работающая как электродвигатель.
Тип электропривода — электропривод на базе асинхронного двигателя.
3) Синхронный двигатель (СД) – это синхронная машина, работающая как двигатель, у которого частота вращения определяется частотой напряжения в рабочей обмотке.
Тип электропривода — электропривод на базе синхронного двигателя.
4) Гистерезисный двигатель и электропривод на базе гистерезисного двигателя.
Название пятого типа электропривода связано с составом элементов, которые входят в функциональную схему.
5) Вентильный двигатель (ВД)
Вентильный двигатель – это не одна только электрическая машина.
Вентильный двигатель — это совокупность синхронной машины и вентильного преобразователя – инвертора, ключи которого управляются по сигналу о положении ротора. Частота напряжения в рабочей обмотке определяется частотой вращения.
Тип электропривода – электропривод на базе вентильного двигателя. Иногда называют вентильный электропривод (хотя в ряде источников этот термин трактуется и шире).
Название шестого и седьмого типов электродвигателей связано с их принципом действия.
6) Шаговый двигатель и шаговый электропривод.
Типы электрических машин, которые применяются в составе шаговых двигателей (электроприводов), могут применяться и в структуре ВД.
7) Следящий электропривод.
В его состав входит один из пяти (п.1-5) перечисленных выше типов двигателей.
Первые четыре типа будут рассмотрены в Разделе 13; пятый и шестой тип – в Разделе 9; седьмой тип – в Разделе 8.5.4 в процессе рассмотрения типовых структур электропривода.
Дата добавления: 2019-09-13 ; просмотров: 848 ; Мы поможем в написании вашей работы!
Электропривод и электродвигатель: в чем разница и какой выбрать?
В мире техники существует множество устройств, которые работают благодаря электрической энергии. Один из самых распространенных на сегодняшний день – это электропривод. Он используется во многих сферах промышленности, транспорта и даже бытовые устройства, такие как стиральные машины, работают на электроприводе.
Однако, многие люди путают его с электродвигателем, который используется в качестве привода двигателя. В чем же различие между этими устройствами и какой из них лучше выбрать в той или иной ситуации? Об этом и пойдет речь в данной статье.
Для начала необходимо знать, что электродвигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Он состоит из двух частей – статора и ротора – которые взаимодействуют друг с другом, чтобы создать работающий механизм. В свою очередь, электропривод – это система управления, которая используется для управления движением различных устройств, и основой этой системы выступает, как правило, электродвигатель.
В чем заключается концепция электропривода?
Что такое электропривод?
Электропривод — это система, в которой устройство или механизм приводится в движение электрической энергией. Он используется в различных машинах, оборудовании и транспортных средствах для обеспечения необходимой мощности и управляемости движения.
В электроприводе наиболее важным компонентом является электродвигатель. В зависимости от типа, он может использоваться для генерации вращательного движения, перевода линейного движения во вращательное и наоборот или для управления скоростью и направлением движения механизма.
Однако электропривод не ограничивается электродвигателем. Он также состоит из других компонентов, таких как приводной шкив, редуктор, зубчатый ремень и контроллер скорости. Каждый из этих элементов имеет свою роль в электроприводе и влияет на его эффективность и производительность.
Преимущества электропривода включают в себя высокую эффективность, низкий уровень шума, эффективное использование энергии и возможность управления скоростью и направлением движения. Он также является более экологичным выбором, поскольку не производит выбросов вредных веществ в окружающую среду.
- Вывод: Электропривод — это система, которая позволяет управлять движением устройства или механизма с помощью электрической энергии. Он включает в себя не только электродвигатель, но и другие компоненты, которые играют важную роль в его функционировании.
- Рекомендуемый выбор: При выборе электропривода необходимо учитывать потребности конкретной системы или механизма. В зависимости от нужд, могут быть выбраны различные типы приводов и компонентов, чтобы обеспечить наибольшую эффективность и производительность.
Что такое электродвигатель?
Электродвигатель – это устройство, которое преобразует электрическую энергию в механическую. Он состоит из статора и ротора, которые образуют магнитное поле, в котором происходит вращение. Статор является неподвижной частью, на которой находятся обмотки, подаваемые электрическим током, создающим магнитное поле. Ротор представляет собой вращающуюся часть, на которой находятся постоянные магниты или обмотки, которые взаимодействуют с магнитным полем статора.
Электродвигатели комплектуются в различных мощностях и размерах, что позволяет использовать их в широком спектре промышленных и бытовых устройств – от маломощных вентиляторов до крупных лебедок и приводов машин. Важно учитывать тип электродвигателя при выборе, так как они могут быть синхронными, асинхронными, шаговыми, бесколлекторными и другими. Кроме того, для правильного выбора необходимо учитывать такие параметры, как номинальная мощность, номинальный ток, режимы работы и другие.
- Синхронные электродвигатели являются более точными и стабильными, чем асинхронные, но могут работать только с точным частотным и мощностным напряжением.
- Асинхронные электродвигатели являются более простыми и универсальными, но имеют большую неравномерность и могут потерять часть своей мощности в нагрузке.
Правильный выбор электродвигателя позволит обеспечить эффективную и надежную работу устройства, а также снизить затраты на энергию и регулярное техническое обслуживание.
Как работает электродвигатель?
Электродвигатель – это устройство, которое преобразует электрическую энергию в механическую. Энергия поступает в двигатель через электрический провод, где создается магнитное поле. Внутри двигателя находятся постоянные магниты и медные провода, которые создают вращающееся магнитное поле.
Когда двигатель получает электрический ток, создается магнитное поле, которое начинает вращаться. При этом статор и ротор двигателя начинают взаимодействовать. Статор – это неподвижная часть двигателя, в которой находятся провода, создающие магнитное поле. Ротор – это часть двигателя, которая вращается вокруг оси.
При взаимодействии статора и ротора происходит перемещение двигателя, который начинает крутиться. Ротор вращается по направлению магнитных полей, которые создает статор. При этом магнитные поля статора постоянно меняются, что позволяет ротору двигаться.
Как работает электропривод?
Электропривод — это система управления движением механизмов и оборудования, которая использует электродвигатель в качестве источника энергии. Она позволяет осуществлять контролируемое перемещение объектов с разной скоростью, направлением и усилием.
Основной элемент электропривода — это электродвигатель, который превращает электрическую энергию в механическую. Все электродвигатели работают на одном принципе: электрический ток в проводах создает магнитное поле, которое действует на постоянные магниты, установленные внутри двигателя. В результате магнитное поле генерирует вращающее усилие, которое приводит в движение вал двигателя.
Управление электроприводом может осуществляться с помощью различных систем управления, таких как программируемые логические контроллеры, частотные преобразователи, сенсоры и датчики. Эти системы позволяют контролировать скорость, ускорение и торможение двигателя, а также изменять направление вращения и управлять моментом вращения.
Применение электропривода находит широкое применение в различных отраслях промышленности, от малых бытовых устройств, таких как электрощетки, до крупных промышленных производств. Это позволяет снизить затраты на энергопотребление, увеличить производительность и надежность оборудования.
Как выбрать электродвигатель?
Шаг 1: Определите категорию электродвигателя, которая подходит для вашего приложения. Существует несколько типов электродвигателей, таких как постоянного тока, переменного тока и синхронные.
Шаг 2: Рассчитайте необходимый крутящий момент для вашего приложения. Это поможет определить мощность, необходимую для выбранного электродвигателя.
Шаг 3: Выберите электродвигатель с нужным количеством оборотов в минуту (об/мин). Этот параметр связан с мощностью и крутящим моментом и может быть изменен с помощью редукторов скорости.
Шаг 4: Оцените уровень шума, производимый электродвигателем. Если приложение находится в окружении, где шум нежелателен (например, в жилых помещениях), выберите электродвигатель с более низким уровнем шума.
Шаг 5: Убедитесь, что выбранный электродвигатель соответствует стандартам безопасности и качества. Используйте информацию о производителях и проверьте рейтинг товара на основе отзывов с других сайтов.
Как выбрать электропривод?
Выбор электропривода представляет собой ответственный этап при проектировании или модернизации технологических процессов.
Первый этап при выборе электропривода заключается в определении типа движущей силы. Она может быть постоянной или переменной частоты. Второй этап – выбор типа привода. Типы привода бывают редукторными, валовыми или безредукторными.
Следующим шагом определимся с требованиями к выбранному электроприводу. Расчет производится на основании мощности, крутящего момента, скорости, частоты вращения и иных параметров, которые определяются подробной технической спецификацией оборудования.
Кроме того, требуется учесть условия эксплуатации электропривода. Это могут быть ограничения внешних воздействий, таких как воздействие пыли, влаги, температурного режима. Также следует учитывать такие параметры, как монтажные условия, размещение в пространстве, электромагнитная совместимость и прочие факторы.
- Одним из важных параметров является класс защиты оборудования, выраженный символом IP. Где IP – International Protection – международная защита.
- Тип сервопривода выбирайте, если требуется высокоточное перемещение. Данный тип привода используется, например, в робототехнике.
- Трехфазный электропривод можно использовать в большинстве технологических процессов в связи с высоким коэффициентом полезного действия, простотой управления, возможностью получения прецизионных показаний.
Подробное изучение параметров электропривода поможет выбрать идеальный вариант для ваших потребностей и повысить эффективность работы оборудования.
Примеры применения электропривода и электродвигателя в промышленности
Производство автомобилей
В производстве автомобилей электропривод и электродвигатели применяются в различных механизмах и системах. Например, электродвигатель используется в двигателях окон, сидений и зеркал заднего вида. Также он является основным элементом электрического двигателя, который, в свою очередь, приводит в движение колеса автомобиля.
Производство пищевой и химической промышленности
В производстве пищевой и химической промышленности электропривод и электродвигатель применяются в системах, связанных с смешиванием и перемешиванием продуктов, а также в системах транспортировки сырья и готовой продукции. Например, основными элементами подобных систем являются насосы, электромоторы, колесные и конвейерные транспортеры, которые обеспечивают непрерывную работу производственных линий.
Производство мебели
В производстве мебели электропривод и электродвигатель используются в системах, отвечающих за исполнение различных технологических операций: обработку древесины, укладку, клеение и отделку поверхностей. Например, электродвигатель является основным компонентом установок, которые используются для фрезерования направляющих в мебельном производстве.