О промышленных контроллерах «на пальцах» для «чайников»
Что такое и какие задачи решает контроллер (регулятор) для промышленности? Каким может быть контроллер и что такое система с микропроцессорным управлением? Подробные ответы на эти вопросы вы найдёте в статье ниже.
Для начала нужно четко понять, что целью любого промышленного контроллера, в том числе программно-логического (с программируемой логикой) является управление оборудованием и/или процессом, а решаемые контроллером задачи в каждом конкретном случае могут быть разными — контролировать последовательность событий, поддерживать постоянство некоторой переменной, следовать какому-то заданному изменению и т. д.
Так, например, система управления автоматическим сверлильным станком может включить опускание сверла, когда заготовка находится в нужном положении, начать собственно сверление, когда сверло достигает заготовки, остановить процесс сверления, когда выполнено отверстие требуемой глубины, поднять сверло, выключить его до момента замены заготовок и повторения операции.

В то же время система управления конвейером может использоваться для контроля количества предметов, движущихся по конвейерной ленте, и направления их в упаковочный ящик, причем о наличии предмета на ленте может поступать сигнал от фотодатчика, датчика температуры, веса, а контроллер будет управлять электродвигателем, перемещающим конвейерную ленту, клапанами проходов/переходов и т. д.

Каким может быть контроллер
Для автоматического сверлильного станка можно использовать электрические цепи, в которых замыкание или размыкание выключателей приводило бы к включению двигателей или срабатыванию клапанов. Так замыкание одного переключателя может активировать реле, которое, в свою очередь, включает ток на двигатель и заставляет сверло вращаться, а другой переключатель — использоваться для активации реле и подачи тока на пневматический или гидравлический клапан, что приводит к переключению давления привода поршня в цилиндре и, соответственно, к перемещению заготовки в требуемое положение.
В свою очередь для контроля количества предметов, направленных конвейером в упаковочный ящик, тоже можно использовать электрические цепи, включающие датчики и двигатели, однако действия контроллера для конвейера и сверлильного станка будут разными и зависят от логики оптимального управления процессом.

Здесь под логикой следует понимать правильную последовательность действия контроллера по завершению события (сигналу от датчика). По сути, контроллер действует в полной аналогии с логикой или мыслительным процессом квалифицированного профильного рабочего, который при ручном сверлении сначала размещает заготовку, потом включает двигатель, опускает сверло, выполняет сверление на заданную глубину, поднимает сверло, выключает двигатель, меняет заготовку. А значит в контроллер необходимо изначально «вложить» эту логику, что может быть сделано с помощью жесткой зависимости переключателя/реле от датчика или путем программирования «умного» контроллера с микропроцессором.
Что такое система с микропроцессорным управлением
По сути, вместо того, чтобы жестко использовать каждую цепь переключений для каждой ситуации, более целесообразно создать одну и ту же базовую систему с набором переключателей, реле, датчиков и микропроцессором, а затем для определенного процесса подготовить программу, которая будет «инструктировать» микропроцессор, как реагировать на каждый входной сигнал и куда подавать управляющие команды. Т. е., упрощенно, это может быть программа вида: «если переключатель «A» замыкается подать сигнал на цепь двигателя, если переключатель «B» замыкается — сигнал на цепь клапана» и т. д.
Изменяя инструкции в программе, можно использовать одну и ту же микропроцессорную систему для управления самыми разными ситуациями, как, например, современная бытовая стиральная машина — входные сигналы в нее поступают от циферблатов, используемых для выбора требуемого цикла стирки, переключателя, сигнализирующего, что дверца машины закрыта, датчиков температуры и уровня воды. На основе этих входных данных микропроцессор запрограммирован на выдачу выходных сигналов, которые включают двигатель барабана и регулируют его скорость, открывают или закрывают клапаны холодной и горячей воды, включают сливной насос, управляют водонагревателем и дверным замком, чтобы машину нельзя открывать, пока цикл стирки не завершится.
Программируемый логический контроллер (ПЛК) — это особая форма микропроцессорного контроллера, который использует программируемую память для хранения инструкций и реализации таких функций, как логика, последовательность, синхронизация, вычисления для управления машинами и процессами. ПЛК изначально разрабатываются инженерами, возможно, с ограниченным знанием компьютеров и языков программирования, но с квалификацией, обеспечивающей создание устройства, которое можно программировать узкопрофильным IT-специалистам по заданному техническому заданию в зависимости от конкретного технологического процесса.

Или проще, контроллеры с пакетом входов и выходов создаются инженерами, а программируются по изначально заданной логике, которая определена конкретным технологическим процессом, программистами, например, если происходит A или B, включается C, если происходит A и B, включается D и т. д. Причем изначально тандемом инженер-программист в контроллер закладывается возможность изменения параметров регулирования, телекоммуникация с системами автоматики, диспетчерским пунктом, пользовательскими терминалами и пр.
Большое преимущество ПЛК заключается в том, что один и тот же базовый контроллер можно использовать с широким спектром систем управления, а, чтобы изменить систему и правила действий нужно всего-то ввести другой набор инструкций. В целом ПЛК похожи на компьютеры, но в то время как компьютеры оптимизированы для задач расчета и отображения, контроллеры с программируемой логикой — для задач управления в промышленной среде, а потому они:
- прочные, надежные, инертные (в допустимых пределах) к вибрациям, шуму, изменениям температуры, влажности;
- имеют интерфейс для входов и выходов уже внутри контроллера;
- легко программируются;
- как правило, имеют понятный язык программирования, который в первую очередь связан с логикой и операциями переключения.
Об основных комплектующих, входах, выходах, интерфейсе контроллеров в следующих материалах.
Силовые контроллеры: назначение, устройство, технические характеристики
Контроллер — аппарат управления, предназначенный для пуска, останова, регулирования скорости вращения и реверсирования электродвигателей. Контакты контроллера включаются непосредственно в цепи питания электродвигателей с напряжением не свыше 600 В.
По устройству контактных частей различают контроллеры со скользящими контактами и кулачкового типа. Контроллеры со скользящими контактами в свою очередь разделяются на барабанные и плоские (последние применяются редко).
Вал контроллера может поворачиваться вручную или от приводимого в движение механизма или от отдельного электродвигателя. Неподвижные контакты (пальцы) располагаются в корпусе аппарата вокруг вала с контактами и изолированы от него. Контроллеры изготовляются только в защищенном исполнении. Для фиксации коммутационных положений служат храповые рычажно-пружинные механизмы.
Заданная программа переключений контроллера осуществляется соответствующей расстановкой подвижных контактов (сегментов). Для улучшения условий коммутации контроллеров постоянного тока снабжаются магнитным гашением. Количество коммутационных положений обычно от 1 до 8 (иногда до 12—20), величина коммутируемого тока не превышает 200 А.
Контроллеры могут работать в повторно-кратковременном режиме с относит, продолжительностью включения (25—60%) или в продолжит, режиме. Допустимая частота включений контроллеров барабанного типа не превышает 300, а кулачкового типа — до 600 включений в час. Наибольшее распространение контроллеры получили в электроприводе подъемно-транспортных машин и механизмов.
Силовые контроллеры являются комплектными устройствами для обеспечения включения цепей обмоток электродвигателей по заранее заданной программе, заложенной в конструкции контроллера. Простота конструкции, безотказность в работе и малые габариты — основные преимущества силовых контроллеров.
При правильном выборе и использовании силовых контроллеров в соответствии с их коммутационными возможностями контроллеры являются надежными и удобными в эксплуатации комплектными устройствами управления крановыми электроприводами, так как в этих устройствах полностью исключены нарушения заданной программы, а включение и отключение, зависящие от действий машиниста, обеспечивают 100 %-ную готовность привода к работе. Однако к недостаткам этих комплектных устройств можно отнести низкую износостойкость и коммутационную способность, а также отсутствие автоматизированного пуска и торможения.
На рис.1 показан контактный элемент барабанного контроллера. На валу 1 укреплён сегментодержатель 2 с подвижным контактом в виде сегмента 3. Сегментодержатель изолирован от вала изоляцией 4. Неподвижный контакт 5 расположен на изолированной рейке 6. При вращении вала 1 сегмент 3 набегает на неподвижный контакт 5, чем осуществляется замыкание цепи. Необходимое контактное нажатие обеспечивается пружиной 7. Вдоль вала расположено большое число контактных элементов. На одном валу устанавливается ряд таких контактных элементов. Сегментодержатели соседних контактных элементов можно соединять между собой в различных необходимых комбинациях. Определенная последовательность замыкания различных контактных элементов обеспечивается различной длиной их сегментов.
Рис.1. Контактный элемент барабанного контроллера.
У кулачковых контроллеров размыкание и замыкание контактов обеспечивается смонтированными на барабане кулачками, поворот которых осуществляется с помощью рукоятки маховика или педали и могут коммутировать от 2 до 24 электрических цепей. Кулачковые контроллеры разделяются по количеству коммутируемых цепей, виду привода, диаграммам замыкания контактов.
В кулачковом контроллере переменного тока (рис.2) перекатывающийся подвижный контакт 1 имеет возможность вращаться относительно центра О2, расположенного на контактном рычаге 2. Контактный рычаг 2 поворачивается относительно центра O1. Контакт 1 замыкается с неподвижным контактом 3 и соединяется с выходным контактом с помощью гибкой связи 4. Замыкание контактов 1,3 и необходимое контактное нажатие создаются пружиной 5, воздействующей на контактный рычаг через шток 6. При размыкании контактов кулачок 7 действует через ролик 5 на контактный рычаг. При этом сжимается пружина 5 и контакты 1, 3 размыкаются. Момент включения и отключения контактов зависит от профиля кулачковой шайбы 9, приводящей в действие контактные элементы. Малый износ контактов позволяет увеличить число включений в час до 600 при ПВ-60 %.
В контроллер входят два комплекта контактных элементов / и //, расположенных по обе стороны кулачковой шайбы 9, что позволяет резко сократить осевую длину устройства. Как в барабанном, так и в кулачковом контроллере имеется механизм для фиксации положения вала.
Контроллеры переменного тока в виду облегченного гашения дуги могут не иметь дугогасительных устройств. В них устанавливаются только дугостойкие асбестоцементные перегородки 10. Контроллеры постоянного тока имеют дугогасительное устройство, аналогичное применяемому в контакторах.
Выключение рассмотренного контроллера происходит при воздействии на рукоятку и передаче этого воздействия через кулачковую шайбу, включение происходит с помощью силы пружины 5 при соответствующем положении рукоятки. Поэтому контакты удается развести даже в случае их сваривания. Недостаток конструкции заключается в большом моменте на валу за счет включающих пружин при значительном числе контактных элементов. Надо отметить, что возможны и другие конструктивные решения привода контактов контроллера. Рис.2. Кулачковый контроллер.
Для плавного регулирования поля возбуждения крупных генераторов и для пуска в ход и регулирования частоты вращения больших двигателей необходимо иметь большое число ступеней. Применение кулачковых контроллеров здесь нецелесообразно, так как большое число ступеней ведет к резкому возрастанию габаритов аппарата. Число операций в час при регулировании и пуске невелико (10—12). Поэтому особых требований к контроллеру с точки зрения износостойкости не предъявляется. В этом случае широкое распространение получили плоские контроллеры.
На рис.3 показан общий вид плоского контроллера для регулирования возбуждения. Неподвижные контакты 1, имеющие форму призмы, укреплены на изоляционной плите 2, являющейся основанием контроллера. Расположение неподвижных контактов по линии дает возможность иметь большое число ступеней. При той же длине контроллера число ступеней может быть увеличено путем применения параллельного ряда контактов, сдвинутого относительно первого ряда. При сдвиге на полшага число ступеней удваивается.
Подвижный контакт выполнен в виде медной щетки. Щетка располагается в траверсе 3 и изолируется от нее. Нажатие создается цилиндрической пружиной. Передача тока с контактной щетки 4 на выходной зажим осуществляется с помощью токосъемной щетки и токосъемной шипы 5. Контроллер рис.3 может одновременно производить переключения в трех независимых цепях. Траверса перемещается с помощью двух винтов 6, приводимых в движение вспомогательным двигателем 7. При наладочных работах перемещение траверсы вручную производится рукояткой 8. В конечных положениях траверса воздействует на конечные выключатели 9, которые останавливают двигатель.
Для того чтобы иметь возможность точной остановки контактов на желаемой позиции, скорость движения контактов берется малой: (5—7)10-3 м/с, а двигатель должен иметь торможение. Плоский контроллер может иметь и ручной привод.
Рис.3. Плоский контроллер.
Преимущества и недостатки разных типов контроллеров
 Вследствие малой износостойкости контактов допустимое число включений контроллера в час превышает 240. При этом мощность запускаемого двигателя приходится снижать до 60% номинальной, из-за чего такие контроллеры применяются при редких включениях.
Вследствие малой износостойкости контактов допустимое число включений контроллера в час превышает 240. При этом мощность запускаемого двигателя приходится снижать до 60% номинальной, из-за чего такие контроллеры применяются при редких включениях.
В контроллере используется перекатывающийся линейный контакт. Благодаря перекатыванию контактов дуга, загорающаяся при размыкании, не воздействует на поверхность контакта, участвующую в проведении тока в полностью включенном состоянии.
Малый износ контактов позволяет увеличить число включений в час до 600 при продолжительности включения 60%.
Конструкция контроллера имеет следующую особенность: выключение происходит за счет выступа кулачка, а включение за счет силы пружины. Благодаря этому контакты удается развести даже в случае их сваривания.
Недостатком этой системы является большой момент на валу, создаваемый включающими пружинами при значительном числе контактных элементов. Возможны и другие конструктивные оформления привода контактов. В одном из них контакты замыкаются под действием кулачка и размыкаются под действием пружины, в другом и включение и отключение совершается кулачком. Однако они применяются редко.
Плоские контроллеры получили широкое распространение для плавного регулирования поля возбуждения крупных генераторов и для пуска в ход и регулирования частоты вращения больших двигателей. Так как необходимо иметь большое число ступеней, то применение кулачковых контроллеров здесь нецелесообразно, потому что большое число ступеней ведет к резкому возрастанию габаритов аппарата.
При размыкании между подвижным и неподвижным контактом появляется напряжение, равное падению напряжения на ступени. Для того чтобы не появлялась дуга, допустимое падение напряжения на ступени берется от 10 В (при токе 200 А) до 20 В (при токе 100 А). Допустимое число включений в час определяется износом контактов и не превосходит обычно 10—12. Если напряжение на ступени равно 40—50 В, то применяется специальный контактор, который перемыкает соседние контакты во время перемещения щетки.
В случае, когда необходимо производить коммутацию цепи при токах 100 А и более с частотой включений в час 600 и выше, применяется система, состоящая из контактора и командоаппарата.
Применение силовых контроллеров в крановом электроприводе
Для управления электродвигателями крановых механизмов применяют контроллеры следующих серий: ККТ-60А на переменном токе и контроллеры пультов DVP15 и UP35/I. Контроллеры этих серий изготовляют в защищенных корпусах с крышками и степенью защиты от внешней среды 1Р44.

Механическая износостойкость силовых контроллеров составляет (3,2 -5) х 10 млн. циклов ВО. Коммутационная износостойкость зависит от силы коммутируемого тока. При номинальной силе тока она составляет около 0,5 х 10 млн. циклов ВО, а при силе тока 50 % номинальной можно получить износостойкость 1 х 10 млн. циклов ВО.
Контроллеры ККТ-60А имеют номинальную силу тока 63 А при режиме работы ПВ = 40 %, но их коммутационная способность весьма невысокая, что ограничивает использование этих контроллеров в тяжелых условиях коммутации. Номинальное напряжение контроллеров переменного тока 38G В, частота 50 Гц.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Что такое контроллер в электрике
Контро́ллер электрический — многопозиционный коммутационный электрический аппарат, предназначенный для управления электрическими вращающимися машинами и трансформаторами путём коммутации резисторов и/или обмоток машин и трансформаторов.
Для чего предназначен контроллер?
controller — регулятор, управляющее устройство): Контроллер — устройство управления в электронике и вычислительной технике. Игровой контроллер — устройство ввода информации, используется в консольных и компьютерных играх. Контроллер домена — сервер, контролирующий область компьютерной сети (домен).
Какие функции в двигателе выполняет контроллер?
Функции контроллера – автоматический запуск и остановка двигателя , индикация рабочего состояния и неисправностей, автоматический останов работы двигателя и вывод ошибок на дисплей контроллера .
Какие контроллеры бывают?
- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД- контроллеры ;
- специализированные.
Для чего служит центральный контроллер?
Контроллер (controller) — специализированный процессор, предназначенный для управления внешними устройствами: накопителями, мониторами, принтерами и т. п. Наличие контроллера освобождает центральный процессор от выполнения этих функций.
Зачем нужны контроллеры информатика?
КОНТРОЛЛЕР (англ. controller), специализированный процессор (см. ПРОЦЕССОР), предназначенный для управления внешними устройствами: накопителями, мониторами, принтерами и т. . Наличие контроллера освобождает центральный процессор от выполнения этих функций.
Силовые контроллеры: назначение, устройство, технические характеристики
Контроллер — аппарат управления, предназначенный для пуска, останова, регулирования скорости вращения и реверсирования электродвигателей. Контакты контроллера включаются непосредственно в цепи питания электродвигателей с напряжением не свыше 600 В.
По устройству контактных частей различают контроллеры со скользящими контактами и кулачкового типа. Контроллеры со скользящими контактами в свою очередь разделяются на барабанные и плоские (последние применяются редко).
Вал контроллера может поворачиваться вручную или от приводимого в движение механизма или от отдельного электродвигателя. Неподвижные контакты (пальцы) располагаются в корпусе аппарата вокруг вала с контактами и изолированы от него. Контроллеры изготовляются только в защищенном исполнении. Для фиксации коммутационных положений служат храповые рычажно-пружинные механизмы.
Заданная программа переключений контроллера осуществляется соответствующей расстановкой подвижных контактов (сегментов). Для улучшения условий коммутации контроллеров постоянного тока снабжаются магнитным гашением. Количество коммутационных положений обычно от 1 до 8 (иногда до 12—20), величина коммутируемого тока не превышает 200 А.
Контроллеры могут работать в повторно-кратковременном режиме с относит, продолжительностью включения (25—60%) или в продолжит, режиме. Допустимая частота включений контроллеров барабанного типа не превышает 300, а кулачкового типа — до 600 включений в час. Наибольшее распространение контроллеры получили в электроприводе подъемно-транспортных машин и механизмов.
Силовые контроллеры являются комплектными устройствами для обеспечения включения цепей обмоток электродвигателей по заранее заданной программе, заложенной в конструкции контроллера. Простота конструкции, безотказность в работе и малые габариты — основные преимущества силовых контроллеров.
При правильном выборе и использовании силовых контроллеров в соответствии с их коммутационными возможностями контроллеры являются надежными и удобными в эксплуатации комплектными устройствами управления крановыми электроприводами, так как в этих устройствах полностью исключены нарушения заданной программы, а включение и отключение, зависящие от действий машиниста, обеспечивают 100 %-ную готовность привода к работе. Однако к недостаткам этих комплектных устройств можно отнести низкую износостойкость и коммутационную способность, а также отсутствие автоматизированного пуска и торможения.
На рис.1 показан контактный элемент барабанного контроллера. На валу 1 укреплён сегментодержатель 2 с подвижным контактом в виде сегмента 3. Сегментодержатель изолирован от вала изоляцией 4. Неподвижный контакт 5 расположен на изолированной рейке 6. При вращении вала 1 сегмент 3 набегает на неподвижный контакт 5, чем осуществляется замыкание цепи. Необходимое контактное нажатие обеспечивается пружиной 7. Вдоль вала расположено большое число контактных элементов. На одном валу устанавливается ряд таких контактных элементов. Сегментодержатели соседних контактных элементов можно соединять между собой в различных необходимых комбинациях. Определенная последовательность замыкания различных контактных элементов обеспечивается различной длиной их сегментов.
Рис.1. Контактный элемент барабанного контроллера.
У кулачковых контроллеров размыкание и замыкание контактов обеспечивается смонтированными на барабане кулачками, поворот которых осуществляется с помощью рукоятки маховика или педали и могут коммутировать от 2 до 24 электрических цепей. Кулачковые контроллеры разделяются по количеству коммутируемых цепей, виду привода, диаграммам замыкания контактов.
В кулачковом контроллере переменного тока (рис.2) перекатывающийся подвижный контакт 1 имеет возможность вращаться относительно центра О2, расположенного на контактном рычаге 2. Контактный рычаг 2 поворачивается относительно центра O1. Контакт 1 замыкается с неподвижным контактом 3 и соединяется с выходным контактом с помощью гибкой связи 4. Замыкание контактов 1,3 и необходимое контактное нажатие создаются пружиной 5, воздействующей на контактный рычаг через шток 6. При размыкании контактов кулачок 7 действует через ролик 5 на контактный рычаг. При этом сжимается пружина 5 и контакты 1, 3 размыкаются. Момент включения и отключения контактов зависит от профиля кулачковой шайбы 9, приводящей в действие контактные элементы. Малый износ контактов позволяет увеличить число включений в час до 600 при ПВ-60 %.
В контроллер входят два комплекта контактных элементов / и //, расположенных по обе стороны кулачковой шайбы 9, что позволяет резко сократить осевую длину устройства. Как в барабанном, так и в кулачковом контроллере имеется механизм для фиксации положения вала.
Контроллеры переменного тока в виду облегченного гашения дуги могут не иметь дугогасительных устройств. В них устанавливаются только дугостойкие асбестоцементные перегородки 10. Контроллеры постоянного тока имеют дугогасительное устройство, аналогичное применяемому в контакторах.
Выключение рассмотренного контроллера происходит при воздействии на рукоятку и передаче этого воздействия через кулачковую шайбу, включение происходит с помощью силы пружины 5 при соответствующем положении рукоятки. Поэтому контакты удается развести даже в случае их сваривания. Недостаток конструкции заключается в большом моменте на валу за счет включающих пружин при значительном числе контактных элементов. Надо отметить, что возможны и другие конструктивные решения привода контактов контроллера. Рис.2. Кулачковый контроллер.
Для плавного регулирования поля возбуждения крупных генераторов и для пуска в ход и регулирования частоты вращения больших двигателей необходимо иметь большое число ступеней. Применение кулачковых контроллеров здесь нецелесообразно, так как большое число ступеней ведет к резкому возрастанию габаритов аппарата. Число операций в час при регулировании и пуске невелико (10—12). Поэтому особых требований к контроллеру с точки зрения износостойкости не предъявляется. В этом случае широкое распространение получили плоские контроллеры.
На рис.3 показан общий вид плоского контроллера для регулирования возбуждения. Неподвижные контакты 1, имеющие форму призмы, укреплены на изоляционной плите 2, являющейся основанием контроллера. Расположение неподвижных контактов по линии дает возможность иметь большое число ступеней. При той же длине контроллера число ступеней может быть увеличено путем применения параллельного ряда контактов, сдвинутого относительно первого ряда. При сдвиге на полшага число ступеней удваивается.
Подвижный контакт выполнен в виде медной щетки. Щетка располагается в траверсе 3 и изолируется от нее. Нажатие создается цилиндрической пружиной. Передача тока с контактной щетки 4 на выходной зажим осуществляется с помощью токосъемной щетки и токосъемной шипы 5. Контроллер рис.3 может одновременно производить переключения в трех независимых цепях. Траверса перемещается с помощью двух винтов 6, приводимых в движение вспомогательным двигателем 7. При наладочных работах перемещение траверсы вручную производится рукояткой 8. В конечных положениях траверса воздействует на конечные выключатели 9, которые останавливают двигатель.
Для того чтобы иметь возможность точной остановки контактов на желаемой позиции, скорость движения контактов берется малой: (5—7)10-3 м/с, а двигатель должен иметь торможение. Плоский контроллер может иметь и ручной привод.
Рис.3. Плоский контроллер.
Преимущества и недостатки разных типов контроллеров
Вследствие малой износостойкости контактов допустимое число включений контроллера в час превышает 240. При этом мощность запускаемого двигателя приходится снижать до 60% номинальной, из-за чего такие контроллеры применяются при редких включениях.
В контроллере используется перекатывающийся линейный контакт. Благодаря перекатыванию контактов дуга, загорающаяся при размыкании, не воздействует на поверхность контакта, участвующую в проведении тока в полностью включенном состоянии.
Малый износ контактов позволяет увеличить число включений в час до 600 при продолжительности включения 60%.
Конструкция контроллера имеет следующую особенность: выключение происходит за счет выступа кулачка, а включение за счет силы пружины. Благодаря этому контакты удается развести даже в случае их сваривания.
Недостатком этой системы является большой момент на валу, создаваемый включающими пружинами при значительном числе контактных элементов. Возможны и другие конструктивные оформления привода контактов. В одном из них контакты замыкаются под действием кулачка и размыкаются под действием пружины, в другом и включение и отключение совершается кулачком. Однако они применяются редко.
Плоские контроллеры получили широкое распространение для плавного регулирования поля возбуждения крупных генераторов и для пуска в ход и регулирования частоты вращения больших двигателей. Так как необходимо иметь большое число ступеней, то применение кулачковых контроллеров здесь нецелесообразно, потому что большое число ступеней ведет к резкому возрастанию габаритов аппарата.
При размыкании между подвижным и неподвижным контактом появляется напряжение, равное падению напряжения на ступени. Для того чтобы не появлялась дуга, допустимое падение напряжения на ступени берется от 10 В (при токе 200 А) до 20 В (при токе 100 А). Допустимое число включений в час определяется износом контактов и не превосходит обычно 10—12. Если напряжение на ступени равно 40—50 В, то применяется специальный контактор, который перемыкает соседние контакты во время перемещения щетки.
В случае, когда необходимо производить коммутацию цепи при токах 100 А и более с частотой включений в час 600 и выше, применяется система, состоящая из контактора и командоаппарата.
Применение силовых контроллеров в крановом электроприводе
Для управления электродвигателями крановых механизмов применяют контроллеры следующих серий: ККТ-60А на переменном токе и контроллеры пультов DVP15 и UP35/I. Контроллеры этих серий изготовляют в защищенных корпусах с крышками и степенью защиты от внешней среды 1Р44.
Механическая износостойкость силовых контроллеров составляет (3,2 -5) х 10 млн. циклов ВО. Коммутационная износостойкость зависит от силы коммутируемого тока. При номинальной силе тока она составляет около 0,5 х 10 млн. циклов ВО, а при силе тока 50 % номинальной можно получить износостойкость 1 х 10 млн. циклов ВО.
Контроллеры ККТ-60А имеют номинальную силу тока 63 А при режиме работы ПВ = 40 %, но их коммутационная способность весьма невысокая, что ограничивает использование этих контроллеров в тяжелых условиях коммутации. Номинальное напряжение контроллеров переменного тока 38G В, частота 50 Гц.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Что такое контроллер управления
Есть в электротехнике, электронике и вычислительной технике термины, которые объединяют устройства самого различного применения. Один из таких многозначных терминов, термин — контроллер.
Что такое контроллер управления?
Само слово контролер, буквально обозначает управление. Устройство, называемое контроллер, буквально означает — устройство, предназначенное для управления, чем либо.
Самым простым и понятным примером контроллер компьютера, который управляет внешними устройствами клавиатурой и мышью компьютера.
Чтобы был понятен спектр охватываемых приборов и устройств, именуемых контроллеры, приведу более сложный пример — контроллеры ControlLogix. Эта система на базе одного автономного контроллера и модулями ввода/вывода позволяет осуществлять дискретное управление постоянными процессами, управление приводами, сервоприводами в самых различных комбинациях.

Используются программируемые контроллеры для автоматического контролирования работы машин, процессов упаковки, автоматизации зданий и конвейеров, управления освещением зданий и систем безопасности.
Еще один пример, это контролер умного дома. Это базовое устройство для работы данной системы. Без контроллеров управления не обходится ни одна система «умный дом». К входам контроллера «умного дома» подключаются различные датчики (утечки воды, наличие газа, дыма, датчики движения и т.д.). К выходам прибора подключаются сервоприводы и реле управления, которые в автоматическом режиме могут отключить газ, воду, регулировать и управлять светом дома.

Обще устройство контроллеров управления
Рассмотрим обще устройство контроллеров управления. Это поможет, на базовом уровне, понять суть их применения и использования в различных системах.
У любого контроллера есть клеммы входа и выхода. Также у контроллеров управления есть клеммы для подключения внешних интерфейсов. Интерфейсы позволяют контролеру получать и передавать сигналы на различные устройства. Существуют сетевые и коммуникационные интерфейсы.
Например, интерфейс USB позволяет менять прошивку контроллера. Сетевой Ethernet позволяет подключить устройство к сети Интернет и мобильному приложению. Интерфейсы промышленных контроллеров (например, Allen-Bradley) поддерживают промышленные сети (DeviceNet, ProfiBus, Ethernet, ControlNet, DH485 и т.п.).
Базовыми элементами любого контроллера являются входы и выходы устройства. На входы поступают информационные сигналы для дальнейшей обработки. На выходы контроллер сам подает сигнал, который чем-либо управляет.
Например, на вход контроллера поступает сигнал с датчика температуры воздуха. На выход подключаем управление работой кондиционера, включение которого зависит от датчика температуры воздуха.
Или еще пример, на вход подключаем датчик движения, на выход — управление освещением, которое включает/выключает освещение по сигналу датчика.
Входы и выходы

Так как возможностей у контроллеров масса, то и использовать их можно в самых различных комбинациях и системах. Однако важно, входы и выходы контроллера могут быть либо аналоговыми, либо цифровыми (дискретными).
- Дискретный вход воспринимает только наличие (единица) или отсутствие (ноль) сигнала.
- Аналоговый вход «видит» параметры сигнала.
Например, датчики температуры, освещенности, влажности должны подключаться к аналоговому входу. Датчик движения или простой выключатель должны подключаться к дискретному входу.
Вывод
Контроллеры управления это устройства позволяющие получать и обрабатывать сигналы, на базе обработанных сигналов (данных), по вложенным в них алгоритмам, управлять различными машинами, механизмами, приборами.
О промышленных контроллерах «на пальцах» для «чайников»
Что такое и какие задачи решает контроллер (регулятор) для промышленности? Каким может быть контроллер и что такое система с микропроцессорным управлением? Подробные ответы на эти вопросы вы найдёте в статье ниже.
Для начала нужно четко понять, что целью любого промышленного контроллера, в том числе программно-логического (с программируемой логикой) является управление оборудованием и/или процессом, а решаемые контроллером задачи в каждом конкретном случае могут быть разными — контролировать последовательность событий, поддерживать постоянство некоторой переменной, следовать какому-то заданному изменению и т. д.
Так, например, система управления автоматическим сверлильным станком может включить опускание сверла, когда заготовка находится в нужном положении, начать собственно сверление, когда сверло достигает заготовки, остановить процесс сверления, когда выполнено отверстие требуемой глубины, поднять сверло, выключить его до момента замены заготовок и повторения операции.
В то же время система управления конвейером может использоваться для контроля количества предметов, движущихся по конвейерной ленте, и направления их в упаковочный ящик, причем о наличии предмета на ленте может поступать сигнал от фотодатчика, датчика температуры, веса, а контроллер будет управлять электродвигателем, перемещающим конвейерную ленту, клапанами проходов/переходов и т. д.
Каким может быть контроллер
Для автоматического сверлильного станка можно использовать электрические цепи, в которых замыкание или размыкание выключателей приводило бы к включению двигателей или срабатыванию клапанов. Так замыкание одного переключателя может активировать реле, которое, в свою очередь, включает ток на двигатель и заставляет сверло вращаться, а другой переключатель — использоваться для активации реле и подачи тока на пневматический или гидравлический клапан, что приводит к переключению давления привода поршня в цилиндре и, соответственно, к перемещению заготовки в требуемое положение.
В свою очередь для контроля количества предметов, направленных конвейером в упаковочный ящик, тоже можно использовать электрические цепи, включающие датчики и двигатели, однако действия контроллера для конвейера и сверлильного станка будут разными и зависят от логики оптимального управления процессом.
Здесь под логикой следует понимать правильную последовательность действия контроллера по завершению события (сигналу от датчика). По сути, контроллер действует в полной аналогии с логикой или мыслительным процессом квалифицированного профильного рабочего, который при ручном сверлении сначала размещает заготовку, потом включает двигатель, опускает сверло, выполняет сверление на заданную глубину, поднимает сверло, выключает двигатель, меняет заготовку. А значит в контроллер необходимо изначально «вложить» эту логику, что может быть сделано с помощью жесткой зависимости переключателя/реле от датчика или путем программирования «умного» контроллера с микропроцессором.
Что такое система с микропроцессорным управлением
По сути, вместо того, чтобы жестко использовать каждую цепь переключений для каждой ситуации, более целесообразно создать одну и ту же базовую систему с набором переключателей, реле, датчиков и микропроцессором, а затем для определенного процесса подготовить программу, которая будет «инструктировать» микропроцессор, как реагировать на каждый входной сигнал и куда подавать управляющие команды. Т. е., упрощенно, это может быть программа вида: «если переключатель «A» замыкается подать сигнал на цепь двигателя, если переключатель «B» замыкается — сигнал на цепь клапана» и т. д.
Изменяя инструкции в программе, можно использовать одну и ту же микропроцессорную систему для управления самыми разными ситуациями, как, например, современная бытовая стиральная машина — входные сигналы в нее поступают от циферблатов, используемых для выбора требуемого цикла стирки, переключателя, сигнализирующего, что дверца машины закрыта, датчиков температуры и уровня воды. На основе этих входных данных микропроцессор запрограммирован на выдачу выходных сигналов, которые включают двигатель барабана и регулируют его скорость, открывают или закрывают клапаны холодной и горячей воды, включают сливной насос, управляют водонагревателем и дверным замком, чтобы машину нельзя открывать, пока цикл стирки не завершится.
Программируемый логический контроллер (ПЛК) — это особая форма микропроцессорного контроллера, который использует программируемую память для хранения инструкций и реализации таких функций, как логика, последовательность, синхронизация, вычисления для управления машинами и процессами. ПЛК изначально разрабатываются инженерами, возможно, с ограниченным знанием компьютеров и языков программирования, но с квалификацией, обеспечивающей создание устройства, которое можно программировать узкопрофильным IT-специалистам по заданному техническому заданию в зависимости от конкретного технологического процесса.
Или проще, контроллеры с пакетом входов и выходов создаются инженерами, а программируются по изначально заданной логике, которая определена конкретным технологическим процессом, программистами, например, если происходит A или B, включается C, если происходит A и B, включается D и т. д. Причем изначально тандемом инженер-программист в контроллер закладывается возможность изменения параметров регулирования, телекоммуникация с системами автоматики, диспетчерским пунктом, пользовательскими терминалами и пр.
Большое преимущество ПЛК заключается в том, что один и тот же базовый контроллер можно использовать с широким спектром систем управления, а, чтобы изменить систему и правила действий нужно всего-то ввести другой набор инструкций. В целом ПЛК похожи на компьютеры, но в то время как компьютеры оптимизированы для задач расчета и отображения, контроллеры с программируемой логикой — для задач управления в промышленной среде, а потому они:
- прочные, надежные, инертные (в допустимых пределах) к вибрациям, шуму, изменениям температуры, влажности;
- имеют интерфейс для входов и выходов уже внутри контроллера;
- легко программируются;
- как правило, имеют понятный язык программирования, который в первую очередь связан с логикой и операциями переключения.
Об основных комплектующих, входах, выходах, интерфейсе контроллеров в следующих материалах.
Что такое контроллер в электрике
Контроллером называется электрический аппарат с ручным управлением, предназначенный для изменения схемы подключения электродвигателя к электропитанию. По конструктивному исполнению контроллеры делятся на барабанные, кулачковые и плоские.
Командоаппаратом называется устройство, предназначенное для переключений в цепях управления силовых электрических аппаратов (контакторов). Иногда они применяются для непосредственного пуска электродвигателей малой мощности, включения электромагнитов и другого электрооборудования. Командоаппараты могут иметь ручной привод (кнопки, ключи управления, командоконтроллеры) или приводиться в действие контролируемым механизмом (путевые выключатели).
Реостат является совокупностью резисторов и контроллера, позволяющей изменять вводимое в цепь сопротивление.
а) Барабанные контроллеры. На рис. 7.1 показан контактный элемент барабанного контроллера. На валу 1 укреплен сегментодержатель 2 с подвижным контактом в виде сегмента 3 Сегментодержатель изолирован от вала изоляцией 4 Неподвижный контакт 5 расположен на изолированной рейке 6. При вращении / сегмент 3 набегает на неподвижный контакт 5, чем осуществляется замыкание цепи. Необходимое контактное нажатие обеспечивается пружиной 7. На одном валу устанавливается ряд таких контактных элементов. Сегментодержатели соседних контактных элементов можно соединять между собой в различных необходимых комбинациях. Определенная последовательности замыкания различных контактных элементов обеспечивается различной длиной их сегментов. Схема соединений сегментодержателей для пуска асинхронного двигателя с фазным ротором показана на рис. 7.1, б. Неподвижные контакты контроллера обозначены с1, л1, сз, лз, жирными горизонтальными линиями обозначены подвижные контакты-сегменты, косыми линиями — перемычки между сегментами. В положении «Вперед» обмотка статора подключается к напряжению сети, а резисторы в цепях обмотки ротора включены полностью. По мере вращения барабана эти резисторы выводятся из цепи обмотки ротора.
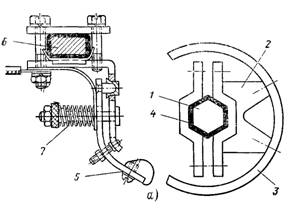
Рис. 7.1. Контактный элемент барабанного контроллера (а): схема соединения для пуска асинхронного двигателя с фазным ротором (б)

Вследствие малой износостойкости контактов допустимое число включений контроллера в час не превышает 240. При этом мощность запускаемого двигателя приходится снижать до 60 % номинальной, из-за чего такие контроллеры применяются при редких включениях.
б) Кулачковые контроллеры. В кулачковом контроллере переменного тока (рис. 7 2) перекатывающийся подвижный контакт 1 имеет возможность вращаться относительно центра расположенного на контактном рычаге 2. Контактный рычаг 2 поворачивается относительно центра Oi. Контакт / замыкается с неподвижным контактом 3 и соединяется с выходным контактом с помощью гибкой связи 4. Замыкание контактов 1, 3 и необходимое контактное нажатие создаются пружиной 5, воздействующей на контактный рычаг через шток 6. При размыкании контактов кулачок 7 действует через ролик 8 на контактный рычаг. При этом сжимается пружина 5 и контакты. /, 3 размыкаются. Момент включения и отключения контактов зависит от профиля кулачковой шайбы 9, приводящей в действие контактные элементы. Малый износ контактов позволяет увеличить число включений в час до 600 при ПВ-60 %. В контроллер входят два комплекта контактных элементов / и 11, расположенных по обе стороны кулачковой шайбы 9, что позволяет резко сократить осевую длину устройства. Как в барабанном, так и в кулачковом контроллере имеется механизм для фиксации положения вала. Контроллеры переменного тока в виду облегченного гашения дуги могут не иметь дугогасительных устройств. В них устанавливаются только дугостойкие асбестоцементные перегородки 10. Контроллеры постоянного тока имеют дугогасительное устройство, аналогичное применяемому в контакторах.
Выключение рассмотренного контроллера происходит при воздействии на рукоятку и передаче этого воздействия через кулачковую шайбу, включение происходит с помощью силы пружины 5 при соответствующем положении рукоятки. Поэтому контакты удается развести даже в случае их сваривания. Недостаток конструкции заключается в большом моменте на валу за счет включающих пружин при значительном числе контактных элементов. Надо отметить, что возможны и другие конструктивные решения привода контактов контроллера.
Рис. 7.2. Кулачковый контроллер
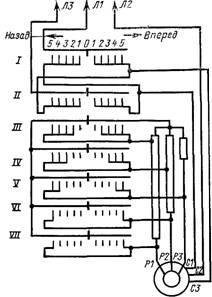
Рис. 7.3. Схема соединений кулачкового контроллера для пуска асинхронного двигателя с фазным ротором
На рис. 7.3 показана схема для пуска асинхронного двигателя с фазным ротором с помощью кулачкового контроллера. Контакты обозначены римскими цифрами, позиции вала аппарата — арабскими. При пуске «Вперед» работают контактные элементы, расположенные справа. Например, в третьей позиции замкнуты контакты /—IV. При этом статор подключен к сети, а в цепи ротора выведены первые ступени пусковых резисторов в двух фазах. В положении 5 все контакты замкнуты и ротор двигателя закорочен.
в) Плоские контроллеры. При большом числе контактов габариты и масса кулачковых и барабанных контроллеров резко возрастают. В этом случае, если число операций в час при регулировании и пуске невелико (10—12), применяются плоские контроллеры. В плоском контроллере на плите из изоляционного материала располагаются неподвижные контакты, по которым скользит подвижный контакт мостикового типа, одновременно соприкасающийся с токосъемной шиной. Такой контроллер показан на рис. 7.19, где по неподвижным цилиндрическим контактам 0 — 13 и шинам 14, 15 скользит подвижный контакт 16 мостикового типа.
Что такое контроллер управления
Есть в электротехнике, электронике и вычислительной технике термины, которые объединяют устройства самого различного применения. Один из таких многозначных терминов, термин — контроллер.
Что такое контроллер управления?
Само слово контролер, буквально обозначает управление. Устройство, называемое контроллер, буквально означает — устройство, предназначенное для управления, чем либо.
Самым простым и понятным примером контроллер компьютера, который управляет внешними устройствами клавиатурой и мышью компьютера.
Чтобы был понятен спектр охватываемых приборов и устройств, именуемых контроллеры, приведу более сложный пример — контроллеры ControlLogix. Эта система на базе одного автономного контроллера и модулями ввода/вывода позволяет осуществлять дискретное управление постоянными процессами, управление приводами, сервоприводами в самых различных комбинациях.
Используются программируемые контроллеры для автоматического контролирования работы машин, процессов упаковки, автоматизации зданий и конвейеров, управления освещением зданий и систем безопасности.
Еще один пример, это контролер умного дома. Это базовое устройство для работы данной системы. Без контроллеров управления не обходится ни одна система «умный дом». К входам контроллера «умного дома» подключаются различные датчики (утечки воды, наличие газа, дыма, датчики движения и т.д.). К выходам прибора подключаются сервоприводы и реле управления, которые в автоматическом режиме могут отключить газ, воду, регулировать и управлять светом дома.
Обще устройство контроллеров управления
Рассмотрим обще устройство контроллеров управления. Это поможет, на базовом уровне, понять суть их применения и использования в различных системах.
У любого контроллера есть клеммы входа и выхода. Также у контроллеров управления есть клеммы для подключения внешних интерфейсов. Интерфейсы позволяют контролеру получать и передавать сигналы на различные устройства. Существуют сетевые и коммуникационные интерфейсы.
Например, интерфейс USB позволяет менять прошивку контроллера. Сетевой Ethernet позволяет подключить устройство к сети Интернет и мобильному приложению. Интерфейсы промышленных контроллеров (например, Allen-Bradley) поддерживают промышленные сети (DeviceNet, ProfiBus, Ethernet, ControlNet, DH485 и т.п.).
Базовыми элементами любого контроллера являются входы и выходы устройства. На входы поступают информационные сигналы для дальнейшей обработки. На выходы контроллер сам подает сигнал, который чем-либо управляет.
Например, на вход контроллера поступает сигнал с датчика температуры воздуха. На выход подключаем управление работой кондиционера, включение которого зависит от датчика температуры воздуха.
Или еще пример, на вход подключаем датчик движения, на выход — управление освещением, которое включает/выключает освещение по сигналу датчика.
Входы и выходы
Так как возможностей у контроллеров масса, то и использовать их можно в самых различных комбинациях и системах. Однако важно, входы и выходы контроллера могут быть либо аналоговыми, либо цифровыми (дискретными).
- Дискретный вход воспринимает только наличие (единица) или отсутствие (ноль) сигнала.
- Аналоговый вход «видит» параметры сигнала.
Например, датчики температуры, освещенности, влажности должны подключаться к аналоговому входу. Датчик движения или простой выключатель должны подключаться к дискретному входу.
Вывод
Контроллеры управления это устройства позволяющие получать и обрабатывать сигналы, на базе обработанных сигналов (данных), по вложенным в них алгоритмам, управлять различными машинами, механизмами, приборами.
Контроллер электрического двигателя
Контро́ллер — многоступенчатый, многоцепной коммутационный аппарат с ручным управлением, предназначенный для изменения схемы главной цепи электрического двигателя или цепи возбуждения, включения и выключения электрической цепи с возможностью одновременно производить сложные переключения схемы управления с помощью одной рукоятки (маховика).
Содержание
Барабанный контроллер
Барабанные контроллеры применяются для управления электрическим двигателем до 60 кВт (включение, выключение, изменение направления вращения и частоты вращения) при редких включениях (до 240 включений в час). Недостатком барабанного контроллера является невысокая износостойкость.
Конструкция барабанного контроллера
Барабанный контроллер состоит из вращающегося вала и группы неподвижных контактов. На изолированном валу крепятся металлические сегменты разного размера, расположенные под разными углами друг к другу и являющиеся подвижными контактами контроллера. Отдельные сегменты могут быть электрически соединены между собой.
Неподвижные контакты (контактные пальцы) крепятся на неподвижном основании и изолированы друг от друга. Каждый контактный палец соответствует сегменту вращающейся части контроллера. К ним подключаются внешние проводники.
При повороте вала контактные пальцы соприкасаются с сегментами в последовательности, определяемой взаимным расположением, размерами сегментов и наличием соединений между ними.
Кулачковый контроллер
Управляется с помощью рычага, число включений в час достигает 600. Особенностью является то, что включение происходит за счёт пружины, а выключения за счет кулачка, поэтому контакты разводятся даже при сваривании.
Плоский контроллер
Предназначены для плавного регулирования поля возбуждения крупных генераторов и для пуска двигателей большой мощности, так как имеют много ступеней для переключения. Управляется с помощью винтов, которые приводятся в движение с помощью электрического двигателя через червячную передачу. При ремонтных работах контроллер приводится в движение вручную, с помощью рукоятки. Недостаток — малая износостойкость.
См. также
Литература
- Касаткин А. С., Немцов М. В. Электротехника: Учебное пособие для вузов. — 4-е изд. — М.: Энергоатомиздат, 1983. — С. 424—426. — 440 с., ил. — 240 000 экз.
- Проставить интервики в рамках проекта Интервики.
- Добавить иллюстрации.
- Системы управления электродвигателем
- Коммутационные аппараты
Wikimedia Foundation . 2010 .
Полезное
Смотреть что такое «Контроллер электрического двигателя» в других словарях:
Контроллер — (англ. controller регулятор, управляющее устройство): В Викисловаре есть статья « … Википедия
Промышленный контроллер — Промышленный контроллер управляющее устройство (контроллер от англ. control управлять), применяемое в промышленности и других отраслях по условию применения и задачам, близким к промышленным (например, на транспорте). Применяется … Википедия
Контроллёр — Контроллер (калька с англ. controller регулятор, управляющее устройство) устройство управления в электронике и вычислительной технике: Игровой контроллер Контроллер домена Контроллер прерываний Контроллер электрического двигателя (например у… … Википедия
Электровелосипед — Электрический велосипед (Электровелосипед) представляет собой велосипед с электрическим приводом, который частично или полностью обеспечивает его движение. В общем случае электровелосипед отличает от обычного велосипеда наличие трёх… … Википедия
ГОСТ Р МЭК 61508-4-2007: Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 4. Термины и определения — Терминология ГОСТ Р МЭК 61508 4 2007: Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 4. Термины и определения оригинал документа: 3.7.4 анализ влияния (impact analysis) … Словарь-справочник терминов нормативно-технической документации
система — 4.48 система (system): Комбинация взаимодействующих элементов, организованных для достижения одной или нескольких поставленных целей. Примечание 1 Система может рассматриваться как продукт или предоставляемые им услуги. Примечание 2 На практике… … Словарь-справочник терминов нормативно-технической документации
устройство — 2.5 устройство: Элемент или блок элементов, который выполняет одну или более функцию. Источник: ГОСТ Р 52388 2005: Мототранспортны … Словарь-справочник терминов нормативно-технической документации
Электрические железные дороги — Идея о применении электричества в передвижению упорно стала разрабатываться с тех пор, как Fontaine в 1873 г. на Венской выставке демонстрировал превратимость динамо машины в электродвигатель. Первый опыт, заставивший технический мир обратить… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Программируемые логические контроллеры: принцип работы, виды и применение
В 60 годах 20 века для управления телефонными станциями, промышленным оборудованием использовались сложные схемы с реле. Они не отличались повышенной надежностью или ремонтопригодностью. Инженерам одной из компаний, американской General Motors, была поставлена цель по созданию нового оборудования. Задачи, на которые оно было рассчитано, выглядели так:
- Упрощение отладки, замены.
- Относительная дешевизна.
- Гибкость, удобство модернизации.
- Снижение риска отказов.
Изобретение, создание микросхем и блоков управления на их основе позволило решить заданные вопросы.
Терминология, объясняющая, что такое ПЛК (PLC), внесена в международные и европейские стандарты качества МЭК, EN.
Что такое контроллер?
Контроллер — управляющее устройство, применяемое в промышленности, на транспорте, в других отраслях и в быту, для автоматического управления оборудованием по заданному алгоритму. Контроллеры широко используются для управления технологическими процессами, поддержания физических параметров объекта управления на заданном уровне и схожих по содержанию задач.
Одним из самых перспективных типов контроллеров на сегодняшний день является электронный программируемый логический контроллер (ПЛК), алгоритмы работы которого описываются программно, хранятся во внутренней памяти контроллера и выполняются встроенным в ПЛК микропроцессором. Взаимодействие электронного контроллера с объектом управления происходит посредством входящих и исходящих электрических сигналов.
Программируемые логические контроллеры имеют относительно простую для понимания архитектуру и широко применяются во встраиваемых системах, системах автоматического контроля, защиты и управления. Конструктивно это, как правило, довольно компактное устройство, состоящее из одного или нескольких соединенных между собой электронных модулей, содержащих разъемы для подачи на контроллер питания и подключения внешних входных и выходных электрических линий, позволяющих контроллеру взаимодействовать с внешним миром.
Структура и устройство ПЛК
Любой плк Siemens или аналогичный, других производителей, ориентирован на выполнение конкретных действий. Микроконтроллер опрашивает блоки ввода информации, чтобы принять решение, сформировать на выходе готовую команду. Упрощенно схема стандартного элемента включает:
- вход;
- центр;
- выход.

Входные цепи образованы набором датчиков (аналоговых или цифровых), переключающих устройств, смарт-систем. В центральном блоке расположены: процессор, обрабатывающий команды, модуль памяти и средства коммуникации. Выходные цепи отвечают за передачу сигнала на моторы привода, вентиляцию, осветительную арматуру. Туда же допускается подключить управляющее смарт- устройство архитектуры ардуино или подобное. Необходимо также выполнить условие подключения ПЛК к цепям питания. Без них устройство работать не будет. Внешний компьютер через унифицированный интерфейс используется для отладки, программирования контроллера.
Программное обеспечение ПЛК
Современный ПЛК имеет развитый комплекс программных средств, состоящих из системного программного обеспечения ПЛК, предоставляемого производителем контроллера и сторонних или собственных программных средств, предназначенных для разработки, отладки и записи в контроллер пользовательских программ.
Системное программное обеспечение ПЛК, состоящее из операционной системы с интегрированным в нее набором драйверов, отвечает за выполнение контроллером пользовательского приложения, обслуживает низкоуровневую систему ввода-вывода контроллера, интерфейсы передачи данных, управляет распределением памяти, режимами энергопотребления, таймерами, осуществляет обработку ошибок, позволяя пользователю, разрабатывающему приложение, полностью сосредоточиться на алгоритмической части решения прикладной задачи.
Средства разработки и отладки пользовательских программ позволяют создавать и корректировать программы, реализующие алгоритмы работы контроллера, моделировать на ПК процесс выполнения программы контроллером, наблюдать за промежуточными результатами вычислений, а также записывать программное обеспечение в контроллер.
Принцип работы ПЛК
По сути, микроконтроллер достаточно близок к реле. Только вместо механических контактов и катушек в нем — электронные цепи. Понять принцип действия будет легко любому инженеру, знакомому со схемами, основами электротехники.
Датчик освещенности на входе подает сигнал в блок обработки данных. В нормальном состоянии процессор не реагирует. Как только сенсор определит падение освещения, изменится его сопротивление, центральный блок задействует цепи питания электроламп.
Для управления ПЛК, его программирования используется бытовой ПК. Несколько отдельных микроконтроллеров образуют каскад с усложненными задачами. Системы «умный дом», автоматика включения двигателя насоса для закачки воды в накопительный бак давно содержат в себе подобные блоки.
Сложные микроконтроллерные устройства обеспечивают охрану, защиту периметра (квартиры), включая связь с полицией (владельцем) через модем, подъем тревоги при проникновении нарушителей, разрушении механизма закрытия двери.
Первый этап работы устройства состоит из экспресс-теста задействованного оборудования. Одновременно идет загрузка операционной среды, управляющих программ. Все как в настольном ПК при старте Windows. Предусмотрена пошаговая отработка команд (отладка), при которой допускается мониторинг, корректировка переменных.
Для простоты восприятия рабочий, шаговый режим ПЛК разбит на типовые циклы. Они повторяются во время функционирования устройства. В каждом цикле, «маршрутной карте» заключаются 3 действия:
Сканирование, обращение к внешним датчикам. Запись значений (состояния) в ячейки памяти.
Анализ действующей программы. Внесение требуемых корректив на основании данных предыдущего шага.
Передача результата вычислений на блоки выхода.
Завершается цикл быстрым переходом к первому этапу «урока».
Рабочая деятельность
Благодаря заранее определённым этапам работы логические контроллеры осуществляют непрерывную обработку и сбор данных. Весь процесс состоит из четырёх пунктов:
- Вначале собирается вся важная информация и данные, входящие в прибор.
- Далее все данные анализируются, обрабатываются.
- Потом вся полученная информация при помощи сигнала передаётся на устройство вывода.
- На интерфейсе дисплея отображаются обработанные данные.
В итоге, по ним пользователь может сделать выводы о функционировании машины.
Видео — Рабочий цикл контроллера
Типы ПЛК
Все ПЛК, выпускаемые Schneider Electric, Mitsubishi, Beckhoff, Omron, Segnetics или Unitronics, четко разделяются по типам. Это же относится к классификации российской продукции, представленной , «Контар», «Текон» и другими. Конструктивно устройства принято обозначать как моноблочные и модульные.

В первом типе содержится полный набор входных, выходных цепей, процессор, источник энергии. Во втором предусмотрена сборка готового ПЛК из отдельных частей. Согласно МЭК 61131, количество и состав модулей варьируются в соответствии с назначением, характеристиками поставляемого заказчику устройства.
Модульный микроконтроллер может управлять посредством Ethernet соединения малопроизводительным собратом, выполняющим специфично назначенные функции (диагностика состояния периметра, безопасность охраняемой зоны). Маломощный адаптер питания в этом случае является отдельным модулем. Обобщенно функциональные возможности второго вида превосходят первый. Но в отдельных ситуациях (микроконтроллер управления чайником Berghof) достаточно моноблочного ПЛК.
Главное достоинство такой конструкции — компактность. При этом полностью завершенная конструкция платы, блока контроллера оборудуется дисплеем и устройством ввода-вывода, кнопочной панелью. Типичный пример — «умный» автоматный моноблок, отвечающий за стабилизацию напряжения.
Из нескольких ПЛК, смонтированных на стандартную рейку, набирается укрупненный узел управления. Первоначально конфигурация микроконтроллеров подразумевала замену существовавших релейных, полупроводниковых схем. Со временем задачи усложнились, но и сохранившиеся ограниченно производительные 8 и 16 разрядные процессоры по-прежнему востребованы в промышленности.
Устройство и принцип работы контроллеров
Контроллеры представляют собой микропроцессорные устройства, выполняющие определенные действия по заложенной в них программе. По сути, контроллеры мало чем отличаются от микро-ЭВМ (компьютеров) и имеют одинаковые с ними основные узлы. Контроллеры, как и большинство существующих на сегодняшний день ЭВМ, построены по архитектуре фон Неймана: они содержат процессор (блок управления + арифметико-логическое устройство)
,
память
и
устройства ввода-вывода
. На рис. 1.1 приведена общая структурная схема контроллера. Однако надо отметить, что конкретные модели контроллеров могут не вполне соответствовать приведенной схеме.
Рис. 1.1. Общая структурная схема программируемых
Рассмотрим основные элементы контроллеров, приведенные на рис. 1.1.
. Основная часть любой ЭВМ, его функция – выполнять команды, записанные в памяти. Тип процессора не является основной характеристикой контроллеров (в отличие от персональных компьютеров), поскольку обычно от контроллеров не требуется очень высокого быстродействия; часто тип процессора даже не указывается в документации к контроллеру. Однако в последнее время развиваются так называемые SCADA-системы (системы контроля управления и диспетчеризации), которые предъявляют новые требования к контроллерам, в частности, поддержку современных сетевых технологий (Ethernet) и многозадачность. Поэтому в современных контроллерах могут применятся достаточно совершенные процессоры, например, Intel Pentium III и др. В то же время, в более простых контроллерах, работающих без связи с другими контроллерами и компьютерами, могут использоваться и более простые процессоры, например, Z80.
Память (ОЗУ и ПЗУ)
. Функция памяти – хранить программу и данные. Обычно контроллеры не имеют большого объема памяти, поскольку они работают под управлением упрощенных узкоспециализированных операционных систем с довольно скромными запросами. Программа контроллера также не занимает большого объема. Следовательно, контроллеры не имеют жестких дисков (в них нет никакой необходимости). Чтобы контроллер не «забывал» программу при выключении питания, память может быть энергонезависимой (EPROM, Erasable Programmable Read Only Memory), это альтернатива жестким дискам, более простая и дешевая, но с малой емкостью. Объем памяти не является важной характеристикой контроллера. Он может быть, например, несколько килобайт (у персональных компьютеров объем памяти составляет порядка сотен мегабайт, т.е. в сотни тысяч раз больше).
Клавиатурно-дисплейный модуль (КДМ)
. Предназначен для управления контроллером, ввода команд, программирования, мониторинга. Не особенно удобен для выполнения перечисленных функций, так как обычно контроллеры могут подключаться к компьютерам, выполняющим те же функции. Как правило, КДМ применяется для настройки контроллера «на месте», т.е. довольно нечасто. По этой причине КДМ обычно небольшой и простой.
Порты ввода-вывода
. Они служат для преобразования двоичной информации в какие-либо физические сигналы (как правило, в дискретные электрические) и обратно. Порты являются неотъемлемой частью любого микропроцессорного устройства, а контроллере они выполняют функцию ввода данных и выдачи управляющих воздействий. Внешние устройства, как правило, не подключаются к шине контроллера напрямую, поскольку их уровни сигналов обычно не совпадают с уровнями сигналов шины контроллера (лог.0 – 0,2 В, лог.1 – 5 В). Кроме того, подключение устройств к шине без гальванической развязки небезопасно, так как любые виды помех (из-за наводок, пробоев изоляции, коротких замыканий и т.д.) поступали бы напрямую в контроллер, что приводило бы к его неустойчивой работе и даже к выходу из строя. Поэтому порты ввода-вывода обеспечивают, во-первых, необходимое преобразование уровней сигналов, и во-вторых, гальваническую развязку.
Дискретные входные сигналы, как правило, несут информацию о замыкании или размыкании какого-либо контакта (рис. 1.2).
Рис. 1.2. контроллер с двумя дискретными входами
и с двумя релейными выходами
Дискретные выходные сигналы представляют собой управляемые контроллером «ключи», способные замыкать или размыкать цепь (рис. 1.2). Дискретные выходы могут быть релейными или транзисторными. Транзисторные выходы обладают высоким быстродействием и бесшумностью. Релейные выходы достаточно медленные и срабатывают с характерными для реле громкими «щелчками», однако они могут коммутировать цепи с большим напряжением, например, 220 В.
Аналоговые входные сигналы несут изменяющуюся информацию в форме тока или напряжения. Аналоговый сигнал может принимать произвольное значение из определенного диапазона, например, от 0 до 12 В. Такой сигнал не может непосредственно восприниматься контроллером, поскольку контроллер оперирует дискретной (двоичной), а не аналоговой информацией. Для преобразования аналогового сигнала в цифровой контроллеры оснащаются аналого-цифровыми преобразователями (АЦП). На каждый аналоговый вход контроллер содержит отдельный АЦП.
Аналоговые выходные сигналы формируются в цифро-аналоговых преобразователях (ЦАП), которые преобразуют двоичный цифровой код в аналоговый сигнал. Следует отметить, что АЦП и ЦАП могут и не находится непосредственно внутри контроллеров, а подключаться как дополнительные модули. АЦП и ЦАП рассматриваются в главе 3.
Шина контроллера связывает все его компоненты. Контроллеры содержат три основные шины. Шина данных используется для передачи данных между процессором и другими элементами. Адресная шина используется для передачи адреса в памяти (или порта ввода-вывода), по которому данные можно прочитать или сохранить. Шина управления используется для передачи сигналов управления из процессора другим элементам. Физически шины представляют собой группу проводящих дорожек на плате или проводов, по которым посылаются цифровые сигналы. Передача данных по шинам называется параллельной передачей. При последовательной передаче данных каждый бит по очереди передается по одному-единственному проводу. А при параллельной передаче данных, например при передаче двоичного числа 01101001 по шине передаются все восемь разрядов одновременно, и каждый разряд по своему отдельному проводу (рис. 1.3).
Рис. 1.3. Параллельная (а) и последовательная (б) передачи данных
Интерфейс предназначен для связи контроллера с компьютером или другими элементами автоматизированной системы. Под интерфейсом понимают унифицированное аппаратно-программное устройство для передачи информации. То есть два разных устройства, обладающих одним интерфейсом, можно подключить друг к другу для обмена информацией. Унификация интерфейсов обеспечивает совместимость подключаемых устройств. Контроллеры могут обладать различными интерфейсами. Обычно контроллеры подключаются через интерфейс к ПЭВМ (рис. 1.1) для программирования и/или мониторинга работы, но могут подключаться также и к другим устройствам и даже к компьютерным сетям. Очевидно, что ПЭВМ, к которой производится подключение, должна обладать соответствующим интерфейсом. Основные типы интерфейсов рассмотрены в главе 4.
Ограничения ПЛК
Не стоит полагать, что наличие программируемого контроллера способно решить все глобальные проблемы пользователя. ПЛК, работающие на основе протоколов Codesys, Modbus (для модульных решений), обладают ограниченной сферой применения. Их выбор обусловлен поставленной задачей. Попытку создать универсальные ПЛК вряд ли можно признать целесообразной.
Подобный ход лишает технологический процесс гибкости. Создание требуемой конфигурации осуществляется комплектацией готового моноконтроллера, согласно проекту заказчика. В исключительных ситуациях проблему решают сборкой мегаустройства из дискретных блоков. Последний вариант предпочтительнее: каждый элемент допускается оборудовать индивидуальным пультом ввода команд, сенсорной панелью, устройством отображения данных.
Роль каналов обмена данными играют кабельные медные шины, оптоволоконная связь. Успешно используются варианты стандартизированных интерфейсов RS-232, RS-485 (кабель), промышленных Profibus или CAN. Не возбраняется коммутация по беспроводным линиям (Wi-Fi).
Место ПЛК в системе управления
Современные контроллеры выполняют несколько функций. Они могут быть «ведущими» или «ведомыми», находиться в центре схемы. Чаще всего они сосредоточены в начальной цепи автоматизации.
До создания миниатюрных интегральных схем рука оператора буквально не успевала переключать режимы на пульте цепи управления. Использование контроллерных блоков «Сегнетикс», «Дельта» и подобных способствовало снятию нагрузки с человека.

Ее переложили «на плечи» машин с выводом на экран данных мониторинга, отображенных в виде мнемосхем и изменяемых параметров. На ПЛК возлагаются задачи по опросу датчиков и регистров, обработке поступающей информации.
Без микроконтроллеров не было бы РСУ, АСУ, сложных автоматных комплексов управления технологическими процессорами. Используя сетевой трафик, ПЛК анализируют данные, успевая проверять состояние портов входа. Главный недостаток, особенность микроконтроллеров состоит в необходимости прошивки, создания программы для работы.
Впрочем, его следует воспринимать двояко: индивидуально создаваемое ПО позволяет проектировать узкоспециализированные изделия под конкретные задачи.
Основы программирования ПЛК. Реле и контроллер
Возможность программирования, безусловно, является главным достоинством систем с ПЛК. Чтобы сделать восприятие процесса предельно понятным, разработчики изобрели визуальное отображение управляющих цепей в виде релейных контактных блоков.
На профессиональном языке такой метод обозначается аббревиатурой LD (logo LAD). В дальнейшем работа ПЛК представляется как взаимодействие отдельных логических элементов. Они выполняют действия таймеров, релейных ячеек, счетчиков. Считается, что благодаря подобной унификации, освоить принципы программирования может каждый. Причем независимо от профильной профессии.
Как работает ПЛК
Перед применением ПЛК, в него необходимо загрузить системное ПО и пользовательскую программу, разработанную для решения конкретной прикладной задачи. Все программное обеспечение ПЛК обычно располагается в энергонезависимой памяти и защищено от повреждения в случае сброса питания. Изменение кода прикладной программы в памяти ПЛК может быть выполнено пользователем многократно.
Типовая схема работы ПЛК может быть описана следующим образом.
К внешним каналам ввода контроллера подключаются датчики, к каналам вывода — исполнительные механизмы. На контроллер подается питание и его системное ПО начинает циклически исполнять пользовательское приложение.
Цикл выполнения приложения состоит из следующих, последовательных этапов:
- системное ПО контроллера считывает состояние каждого входного канала контроллера и записывает его во внутреннюю память контроллера;
- системное ПО контроллера, последовательно, команда за командой, выполняет всё пользовательское приложение: каждая исполняемая команда приложения считывает из внутренней памяти необходимые ей данные, производит с ними вычисления и записывает результаты своих расчетов во внутреннюю память контроллера;
- системное ПО контроллера получает из внутренней памяти те значения, которые необходимо отобразить на выходе контроллера, и переводит выходные каналы в соответствующее состояние, после чего, весь цикл выполнения повторяется с начала.
Рассмотренный подход к архитектуре среды исполнения пользовательской программы, дает возможность реализовать логически параллельное исполнение контроллером нескольких задач в рамках одной пользовательской программы, позволяя автоматизировать управление несколькими одновременно происходящими процессами используя единственный ПЛК.
Языки программирования ПЛК
Создатели микроконтроллеров обеспечили взаимодействие разрабатываемых устройств с несколькими универсальными языками программирования. Условно их разделяют на графические и текстовые. Это допускает компиляцию готового программного продукта из блоков, созданных на разных языках.

Обманчивая простота программирования скрывает трудности, с которыми обязательно столкнется излишне самоуверенный инженер. Составить простейшие команды под силу неопытному пользователю. Для реализации сложных понадобится получение специальных навыков.
Удаленное управление и мониторинг
Различные интерфейсы управления встраиваются в контролеры уже на стадии проектирования. Предусмотрена синхронизация с АСУ (SCADA и подобные). Оператор контактирует с ПЛК посредством интегрированной панели, устройства ввода-вывода, либо удаленно. Для этого по помехозащищенному каналу, кабельной сети к блоку подключается HMI, специализированный интерфейс взаимодействия между человеком и машиной.
Каким из доступных способов выполнить реализацию, с помощью простейшего клавиатурного модуля или сенсорной панели — решать заказчику. В последнее время активно используются «облачные» хранилища, виртуальные серверы. Не остаются в стороне и стандартные, Intranet (локальные) и Internet (внешние) подключения.
Реализация веб-интерфейса допускается также и без проводов, в сети Wi-Fi. Описанные методы невероятно расширяют возможности оператора. Упрощают контроль работающего комплекса ПЛК.
Типы связи систем
Умное удаленное освещение дома
Связь для управления этой довольно сложной системой является немаловажным компонентом. Существует несколько основных типов связи:
- Беспроводная локальная. Этот тип связи имеет ограниченный радиус действия и производится с помощью радиосигнала, Wi-Fi, или же в крайнем случае Bluetooth. Управление осуществляется с любой точки помещения или даже придомовой территории. Однако, если дом многоэтажный и ещё выполнен из материала, который выполняет экранирующую функцию (обшитый железом или даже состоит бетонных плит с арматурной увязкой), то устанавливаются специальные, усиливающие беспроводной сигнал, приборы или же дополнительные радиоточки;
- Удалённая беспроводная связь. Она возможна при условии подключения контроллера умного дома к глобальным сетям или системам расширения связи, которые обеспечивают постоянный доступ к ним. Это такие сети, как GSM/GPRS, любой мобильны интернет. То есть, даже если отсутствует интернет можно отправить или получит смс на телефон о состоянии той или иной системы управляемой контроллером. Основные устройства связи это телефон (смартфон), планшет или ноутбук.
- Проводной локальный. Это один из устаревших и выходящих из обихода способов, но всё же обладающих хорошей надёжностью. Связь происходит по кабелю, витой паре или электрической проводке. Любой центральный или региональный контроллер умного дома имеет такое подключение. Расширение связи и функции происходит с помощью коммутатора, который создаёт несколько ответвлений. Управление осуществляется путём нажатия кнопок на панели управления, она может быть сенсорной или же механической. Но иногда и через компьютер можно выполнять соединение, но это не совсем удобно теряется мобильность в управлении.
- Проводной удаленный способ. Это довольно дорогой способ, так как подразумевает прокладку большого количества кабельной продукции. И чем дальше будет расположен блок управления тем проблемнее его связь с контроллером. Чаще всего такой метод связи применяется не для частных а для государственных организаций и структур для управления несложными процессами корпусов зданий и близлежащей территории. Для домашнего пользования применяется крайне редко.
То есть устройства, за счёт которых, и происходит непосредственное управление чаще всего идут в комплекте. Представляют они из себя графические панели управления с кнопочным или сенсорным воздействием, также это могут быть пульты дистанционного управления, настроенные на радиочастоту передатчика. Такие приборы управления, как мобильные телефоны, компьютеры или планшеты, естественно, приобретаются отдельно. Связь через них и управление происходит при помощи специально разработанного программного управления, которое и обеспечивает удалённый доступ при помощи интернета.
Применение контроллеров
Современный ПЛК, недорогой и надежный, находит применение в ПИД-регуляторах, счетчиках типа «Меркурий», промышленных устройствах серии DVP. Компактность блоков позволяет встраивать их в бытовую технику, монтировать в щитах и шкафах совместно с прочим электрооборудованием.
Энкодер, подключенный к контроллеру, применяется в автомобилестроении, реагируя на изменение угла поворота руля. Удобно использовать ПЛК при создании комплексов с ЧПУ, автоматизированных систем запуска аварийной откачки сточных вод в канализации. Видеонаблюдение, интегрированное в охранный пост, создаст полноценный обзор зоны наблюдения для оператора.
Все требуемые данные при этом будут сохранены на носителе информации (переданы в сеть), а в случае опасности сигнал тревоги будет подан автоматически. Цепочке контроллеров под силу управлять работой цеха металлообработки, пошивочной мастерской. В домашнем варианте ПЛК без участия человека включит свет, накачает воду из колодца в бак до требуемого уровня.
Производители ПЛК
На рынке представлены компании из России, США, ФРГ, Японии. Это Texas Instruments, Carel, Delta Electronics, Schneider Electric, Mitsubishi, Beckhoff, Omron, Segnetics, Unitronics. Отечественную продукцию представляют марки «Овен», «Контар», «Текон».
Выбор конкретного решения зависит от предъявляемых заказчиком требований, условий работы. А чтобы разобраться, чем ПЛК100, ПЛК110 отличается от ПЛК160, ПЛК323 потребуется обладание квалификацией, возможно — консультации специалистов.
На что обращать внимание при покупке
До приобретения ПЛК нужно кое-что уточнить. Вот эти факторы:
Универсальность программной среды. Единые языки для всех аппаратных платформ.
Наличие контролеров с распределенным, интегрированным вводом-выводом.
Реализация связи ПЛК со стационарным компьютером.
Специализированное оборудование. Это микросистемы, ориентированные на работу с облачным сервисом (вариант оповещения по мобильной связи, почте).
Открытая архитектура отдельных ПЛК.

Данный перечень создает направление для движения как покупателей, так и производителей. Какой из перечисленных критериев окажется в приоритете, решает заказчик. С дружественным ПО эксплуатация станет удобнее. Так утверждают опытные инженеры-наладчики.
Что же выбрать
ПЛК 110 «Овен» или Simatic s7 производства «Сименс», Modicon m340, Segnetics trim5 четко подчинены встроенной инструкции. Работают по разработанному производителем алгоритму. Программное обеспечение разных марок не всегда совместимо, это учитывается при модернизации (замене) или комплектации технологических цепочек средствами автоматизации.
Кому-то термины step7, ms4, opc, pixel ни о чем не говорят. Разобраться с каталогом, обилием информации помогут специалисты. Расшифровка обозначения микроконтроллера, выбор программы ПЛК для человека неосведомленного станут непосильной задачей. Отличие, оценка, сравнение представленных решений также достаточно сложны, чтобы приступать к ним без подготовки.
Выбрать свой прибор помогут отзывы, обзоры, опыт эксплуатации владельцев контроллеров. Нужный микронтролллер — не обязательно дорогой. Цена определяется выполняемыми функциями, маркой прибора. Описание, настройка параметров приводятся в паспорте устройства.
Там же находится перечень портов ввода-вывода, краткое пособие как подключать изделие. Для отдельных типов может понадобиться преобразователь напряжения, его характеристики производитель обязан указать в руководстве по эксплуатации. А хороший контроллер — тот, который справляется с поставленными задачами.
Программирование без программиста
Одной из базовых идей, лежащих в основе использования ПЛК, является упрощение системы программирования и повышение наглядности языковых средств до уровня, доступного для понимания техническому специалисту хорошо знающему и непосредственно эксплуатирующему оборудование, но не обладающему специальными знаниями в области разработки программного обеспечения.
Такой специалист, получив простой и понятный инструмент выражения своих знаний об алгоритмах управления процессами, находящимися в его ведении, во многих случаях будет способен самостоятельно реализовать и отладить программу ПЛК, а при необходимости перенастроить параметры работы оборудования и своевременно изменить программу управления.
Зачастую качество программы ПЛК созданной таким специалистом оказывается выше, чем программы, написанной по его заданию профессиональным программистом не знакомым со всеми особенностями работы автоматизируемого процесса.