6 Приводы станков
Привод — устройство, служащее для приведения в действие исполнительных звеньев станка. В привод входит также источник движения. Привод должен обеспечивать возможность регулирования скорости движения исполнительных звеньев станка.
Приводы станков подразделяют на ступенчатые и бесступенчатые.
К ступенчатым приводам относят приводы со ступенчатыми шкивами, с шестеренными коробками скоростей и приводы в виде многоскоростных асинхронных электродвигателей. Возможны также ступенчатые приводы, являющиеся комбинацией упомянутых выше механизмов.
К бесступенчатым приводам можно отнести приводы с механическими вариаторами, электродвигатели постоянного тока с регулируемой частотой вращения, гидравлические приводы и комбинированные.
Источником энергии в станках обычно является электродвигатель. Электродвигатель может быть расположен рядом со станком (рисунок 1.2, а), внутри него (рисунок 1.2, б), на станке (рисунок 1.2, в), встроен в переднюю бабку (рисунок 1.2, г и д) и т.д.
Привод с шестеренной коробкой скоростей является наиболее распространенным типом привода главного движения в металлорежущих станках. Его достоинством являются компактность, удобство в управлении и надежность в работе. Но приводы с шестеренными коробками скоростей не имеют бесступенчатого регулирования скорости, у них сравнительно низкий КПД на высоких частотах вращения при широком диапазоне регулирования.
Существует много различных конструкций коробок скоростей (рисунок 1.3), однако все они представляют собой сочетание отдельных типовых механизмов. Коробки скоростей различают по способу переключения скоростей и компоновке.
По способу переключения скоростей коробки бывают с передвижными (скользящими) колесами; с кулачковыми, фрикционными и электромагнитными муфтами; с комбинированным переключением; со сменными колесами.
В зависимости от компоновки различают коробки скоростей, встроенные в шпиндельную бабку, и коробки скоростей с разделенным приводом.
У некоторых моделей токарных, револьверных н фрезерных станков коробка скоростей вынесена из
шпиндельной бабки, вращение шпинделю передается через ременную передачу (рисунок 1.4). Большие частоты вращения шпиндель 4 получает от коробки скоростей 1 через ременную передачу 2. В этом случае муфта 3 включена, а зубчатые колеса z2 и z3, жестко закрепленные на пустотелой втулке, путем осевого смещения втулки выключены. Малые частоты вращения шпинделя получают при выключенной муфте и включенных зубчатых колесах z2 и z3. В этом случае вращение от коробки скоростей 1 передается шпинделю 4 через ременную передачу 2 и зубчатые колеса z1/z2 z3/z4.
Разделенный привод с разгруженным шпинделем обеспечивает более плавное вращение шпинделя и его часто применяют в точных станках.
7 Коэффициент полезного действия привода станка
Коэффициент полезного действия (КПД) привода станка определяется отношением эффективной мощности резания, необходимой на обработку одной детали, к общей потребляемой станком мощности при работе в установившемся режиме:
где Nэф — эффективная мощность резания; Nс — мощность, затрачиваемая на преодоление вредных сопротивлений в механизмах станка.
КПД зависит от полезной нагрузки, частоты вращения, кинематической схемы привода, конструкции его элементов и качества их изготовления. общий КПД станка равен 0,75—0,85.
КПД отдельных кинематических цепей определяют как произведение КПД промежуточных кинематических пар:
Приводы и передачи станков
Приводом называют механизмы, передающие движение от источника движения (электродвигателя) к рабочему органу станка . Различают приводы главного движения, подач и вспомогательных движений. Приводы могут быть механическими, гидравлическими, пневматическими и электрическими со ступенчатым и бесступенчатым регулированием скоростей. Современные станки имеют индивидуальный привод от одного или нескольких отдельных электродвигателей.
Индивидуальные электродвигатели располагают по отношению к станку по-разному. Отдельно от станка, когда движение приводному валу станка передают ременной ( рис. 260, а ) или цепной ( рис. 260, б ) передачей. Фланцевый электродвигатель прикрепляется к заранее предусмотренному месту того или иного узла станка и движение приводному валу станка передают зубчатыми колесами Z1, Z2 ( рис. 260, в ). При встроенном электродвигателе ( рис. 260, и ) ротор его является одновременно и шпинделем станка.
Рис. 260. Приводы и передачи, применяемые в станках.
Передачей в токарных и других станках называют механизм, передающий или преобразующий движение от одного элемента к другому. Наибольшее распространение в станках имеют передачи: ременная, цепная, зубчатая, червячная, реечная, винтовая и др.Ременная передача (рис. 260, а) осуществляется плоскими, клиновидными, а иногда и круглыми ремнями.
Передаточное отношение ременной передачи
где η = 0,98 — коэффициент, учитывающий проскальзывание ремня; d 1 — диаметр ведущего шкива в мм; d 2 — диаметр ведомого шкива в мм.
Цепная передача (рис. 260, б) осуществляется двумя звездочками и соединяющей их бесшумной или роликовой цепью. Передаточное отношение цепной передачи
i = Z 1 / Z 2 = n 2 /n 1 ,
где Z 1 , Z 2 — количество зубцов ведущей и ведомой звездочек, а n1 и n2 — их числа оборотов.
Зубчатая передача (рис. 260, в, е и з) состоит из цилиндрических или конических зубчатых колес. Передаточное отношение зубчатой передачи
i = Z 1 / Z 2 = n 2 /n 1 ,
где Z 1 , Z 2 — количество зубцов ведущего и ведомого зубчатого колеса, а n1, n2 — их числа оборотов.
Червячная передача (рис. 260, г) состоит из червячного винта и червячной шестерни. Обозначим число заходов червячного винта К, а число зубцов червячного колеса – Z. Передаточное отношение червячной передачи
i = K / Z = n 2 / n 1 .Реечная передача (рис. 260, д) состоит из рейки и зубчатого колеса или рейки и червяка. Эта передача преобразует вращение зубчатого колеса или червяка в поступательное движение рейки (или вала зубчатого колеса). Обозначим число зубьев реечного колеса через Z, число заходов червяка через К, а модуль и шаг рейки — соответственно m и t. При n оборотах реечной шестерни или червячного колеса рейка пройдет путь S = tZn = πmZn мм.
Винтовая передача (рис. 260, ж) состоит из винта и гайки. Она преобразует вращательное движение винта в поступательное движение гайки. Если шаг винта tx, то путь гайки за n оборотов винта будет S = tx n мм.
Кинематические схемы станков представляют собой совокупность условных обозначений передач и механизмов в целях выяснения их взаимной связи и принципов работы. По таким схемам определяют все кинематические цепи и получают представление о конструкции станка. Основные условные обозначения, принятые ГОСТом в кинематических схемах, показаны на рис. 261. Для передачи и преобразования движений в токарных станках применяются разнообразные элементарные механизмы, рассматриваемые ниже.
Машиностроение и механика



Станочное оборудование — Понятие привода, назначение, требования к приводам
| Article Index |
|---|
| Станочное оборудование |
| Проектные критерии, предъявляемые к станочному оборудованию |
| Обобщенные (базисные) показатели оценки качества оборудования |
| Точность, источники возникновения погрешностей |
| Критерии работы станочного оборудования – жесткость |
| Прочность, износостойкость, теплостойкость |
| Эргономические основы проектирования оборудования |
| Понятие привода, назначение, требования к приводам |
| Ступенчатое, бесступенчатое, смешанное регулирование скорости движения рабочего органа |
| Цели и задач кинематического расчета, его последовательность |
| Порядок построения СТС и ГЧВ |
| Расчет чисел зубьев передач МРС |
| Отклонения множительной структуры |
| Шпиндельный узел |
| Гидродинамические и гидростатические опоры шпинделей |
| Несущая система станка |
| Направляющие МРС |
| Организация ремонта и обслуживания |
| All Pages |
Понятие привода, назначение, требования к приводам, основные виды приводов, основные способы регулирования скорости приводов.
Привод – совокупность механизмов, передающих движение от источника энергии до элемента, выполняющего заданное движение в станке.
Назначение привода : приводы МРС предназначены для осуществления рабочих, вспомогательных и установочных перемещений.
Их делят на приводы гл.движения (обеспечивают скорость резания) и приводы подач (для координатных и вспомогательных перемещений).
Требования к приводу:
Общие: соответствие осн. хар-к привода ( v перемещения, мощности, крутящего момента, хар-ка диапозона регулирования скорости и т.д.)
· обеспечение обработки деталей заданной номенклатуры с заданной производительностью, точностью и параметрами шероховатости;
· обеспечение заданных конструктивно-технологических требований по хар-кам точности перемещения раб.органа, уровню автоматизации управления приводом, удобство компановки;
· надежность привода в эксплуатации, особенно ограничение перегрузок при переходных процессах;
· высокий КПД привода, чтобы был минимум энергетических потерь;
· ограничение уровня шума (ниже нормы);
· применение унифицированных типовых стандартизованных покупных узлов-агрегатов, других элементов приводов;
· рациональные габариты, материалоемкость и стоимость привода.
Виды приводов: В общем случае в привод входит источник движения (двигатель), механизм изменения передаточного отношения, механизмы вкл/выкл реверсирования, исполнительный орган.
В станках применяют приводы:
1. вращательного движения;
3. периодического (храповые механизмы, мальтийские кресты)
Для главного движения самый распространенный привод – электромеханический (электродвигатель пост. или переменного тока + механическая часть: зубчатые, фрикционные передачи + передаточные механизмы, коробки скоростей, кулисные передачи, кулачковые механизмы, исполнительный орган (как правило шпиндель)).
В станках с прямолинейным (возвратно-поступательным) движением (строгальные, долбежные, протяжные станки) кроме электромеханического используют гидроприводы (гидродвигатель (силовой гидроцилиндр или гидромотор с источником энергии – насосом) + управляющее устройство (дроссели, распределители) + передача к раб. органу)
Особенность станков с ЧПУ: каждый привод имеет свой источник движения (электро- или гидродвигатель).
Виды и способы регулирования скорости:
1. изменением частоты вращения двигателя;
2. изменение передаточного отношения между двигателем и раб.органом в приводном механизме
Регулирование может осуществляться:
1. при постоянной предельной мощности во всем диапазоне скоростей;
2. при постоянном моменте;
3. при комбинировании п1 и п2
По характеру регулирования скорости различают ступенчатое, бесступенчатое и смешанное регулирование.
Ступенчатое изменение скорости обеспечивается коробками скоростей, ступенчатыми шкивами, асинхронными двигателями и т.д.
Бесступенчатое – электродвигатель постоянного тока, гидродвигатель, механический вариатор или комбинированный привод.
Основные параметры технической характеристики приводов главного движения, виды диапазонов регулирования и их выбор. Классификация приводов по назначению, типу и количеству источников движения, характеру регулирования скорости движения рабочего органа. Основные параметры технической характеристики приводов главного движения:
1. предельные частоты вращения шпинделя (числа двойных ходов) nmax , nmin ;
2. промежуточные значения частот вращения шпинделя ni ;
3. число частот вращения шпинделя z ;
4. мощность электродвигателя, кВт;
5. максимальные габаритные размеры заготовки, мм.
Виды диапазонов регулирования:
1. — диапазон скоростей регулирования;
2. — диапазон частот вращения;
3. — диапазон двойных ходов;
4. — диапазон рабочих подач;
5. — диапазон диаметров обработки для станков с главным вращательным движением заготовки;
6. — диапазон длин обработки для станков с главным возвратно-поступательным движением.
Выбор диапазона регулирования реально в большинстве случаев определяется на основании статистического анализа работы аналогичного оборудования в производственных условиях.
1. по назначению:
· привод холостых ходов и быстрых перемещений;
· быстрого поворота на точный фиксированный угол;
· привод механизмов управления и переключения;
· вспомогательных механизмов (н-р, зажим и разжим заготовки);
· активного контроля размеров в процессе обработки;
· удаления стружки и т.д.
2. по типу источника движения:
3. по количеству источников движения:
· все исполнительные органы получают движение от одного источника через разветвленную кинематическую цепь (токарно-винторезные, токарно-револьверные, токарно-карусельные станки);
· каждый исполнительный орган получает движение от отдельного источника (станки с ЧПУ);
· один или несколько раб.органов получают движение от одного или нескольких ист.движения (универсально-фрезерные станки).
4. по характеру регулирования скорости движения раб.органа:
Основные параметры технической характеристики приводов подач, виды диапазонов регулирования и их выбор. Классификация приводов по назначению, типу и количеству источников движения, характеру регулирования скорости движения рабочего органа.
Основные параметры технической характеристики приводов подач:
1. предельные значения подач Smax , Smin ;
2. промежуточные значения подач Si ;
4. мощность электродвигателя, кВт;
5. максимальные габаритные размеры заготовки, мм.
Виды диапазонов регулирования:
7. — диапазон скоростей регулирования;
8. — диапазон частот вращения;
9. — диапазон двойных ходов;
10. — диапазон рабочих подач;
11. — диапазон диаметров обработки для станков с главным вращательным движением заготовки;
12. — диапазон длин обработки для станков с главным возвратно-поступательным движением.
Выбор диапазона регулирования реально в большинстве случаев определяется на основании статистического анализа работы аналогичного оборудования в производственных условиях. Классификация приводов:
5. по назначению:
· привод холостых ходов и быстрых перемещений;
· быстрого поворота на точный фиксированный угол;
· привод механизмов управления и переключения;
· вспомогательных механизмов (н-р, зажим и разжим заготовки);
· активного контроля размеров в процессе обработки;
· удаления стружки и т.д.
6. по типу источника движения:
7. по количеству источников движения:
· все исполнительные органы получают движение от одного источника через разветвленную кинематическую цепь (токарно-винторезные, токарно-револьверные, токарно-карусельные станки);
· каждый исполнительный орган получает движение от отдельного источника (станки с ЧПУ);
· один или несколько раб.органов получают движение от одного или нескольких ист.движения (универсально-фрезерные станки).
Типы приводов и их механизмы
Совокупность устройств, приводящих в движение рабочие органы металлорежущих станков, называют приводом. Он состоит из двигателя, являющегося источником движения, и механизмов, передающих движение рабочим органам и трансформирующих его. Передаточный механизм часто служит для увеличения крутящего момента (или усилия) и уменьшения скорости, т. к. широко применяемые электродвигатели имеют частоту вращения 3000, 1500, 1000, 750 и 600 об./мин при сравнительно небольшом крутящем моменте. В большинстве случаев скорости нужны меньшие, а моменты бóльшие, что достигается установкой за двигателем редуктора. Если же необходимо иметь несколько скоростей рабочего органа машины, то за двигателем следует коробка передач (скоростей). Привод также может содержать муфты для соединения валов (например, электродвигателя и редуктора), устройства, предохраняющие от перегрузки, изменяющие направление движения, преобразующие один вид движения в другой (например, вращательное в поступательное), блокировочные и др. (см. далее). Наиболее распространены электрический, гидравлический и пневматический приводы, причем последние два получают энергию от электродвигателя.
1. Электропривод
В качестве двигателей электропривода чаще всего применяют односкоростные асинхронные электродвигатели переменного тока с короткозамкнутым ротором. Асинхронная машина включается в трехфазную сеть, поэтому она должна иметь на статоре три фазные обмотки, создающие вращающееся магнитное поле, которое увлекает за собой ротор. Ротор вращается асинхронно, т. е. со скоростью, отличной от скорости поля. Обладая жесткой характеристикой (зависимостью крутящего момента от числа оборотов), эти двигатели обеспечивают постоянство мощности во всем диапазоне скоростей и незначительное изменение числа оборотов вала под нагрузкой.
Применение асинхронных электродвигателей с электрическим переключением скоростей путем изменения числа пар полюсов значительно упрощает коробки передач. Однако асинхронные электродвигатели с переключением скоростей обладают постоянным моментом на разных скоростях, что снижает их эффективность при малых оборотах.
Характерной частью большой группы электрических машин является коллектор — полый цилиндр, собранный из изолированных друг от друга медных колец. Наличие коллектора у машин переменного тока позволяет подвести фазы к ротору. Асинхронные электродвигатели с фазным ротором применяются для механизмов с плавным, ступенчатым пуском в тяжелых условиях при продолжительном режиме работы.
Использование электродвигателей постоянного тока, частоту вращения которых в достаточно широких пределах можно регулировать (при постоянной мощности в определенном диапазоне скоростей) изменяя поле возбуждения, оказывается более предпочтительным, т. к. значительно упрощает коробку передач.
В двигателях постоянного тока коллектор обеспечивает постоянный по направлению вращающий момент. Область применения коллекторных машин, в особенности машин постоянного тока, достаточно обширна, а наличие простых и малогабаритных выпрямительных устройств позволяет подключать их к сетям переменного тока. Особенно ценное свойство коллекторной машины постоянного тока — возможность плавного (бесступенчатого) регулирования частоты вращения ротора.
Синхронной называется электрическая машина, скорость вращения ротора которой связана постоянным отношением с частотой сети переменного тока, в которую эта машина включена. Синхронные электродвигатели целесообразны в тех случаях, когда необходим двигатель, работающий при постоянной скорости. У синхронных двигателей КПД несколько выше, а масса на единицу мощности ниже, чем у асинхронных двигателей, рассчитанных на ту же частоту вращения.
Для осуществления вспомогательных движений нередко используют электромагниты.
2. Гидропривод
Гидравлические приводы основаны на энергии давления жидкости. Их подразделяют на объемные и гидродинамические. В гидродинамическом приводе используется кинетическая энергия жидкости, в объемном — потенциальная энергия, преобразуемая в механическую работу. Объемный гидропривод обеспечивает большие передаточные отношения, силы и крутящие моменты, обладает высокой компактностью и энергоемкостью, удобен в управлении, позволяет реализовать любые циклы работы исполнительных органов машин.
Объемным гидроприводом называется совокупность одной или нескольких объемных гидропередач, гидроаппаратуры и вспомогательных гидроустройств.
Достоинства объемного гидропривода:
- Высокая энергонапряженность. Современные насосы создают давление до 40– 70 МПа (т. е. до 700 кг/см 2 ). Поэтому гидропривод имеет меньшие по сравнению с электроприводом массу и габариты и применяется для привода машин, развивающих большие усилия (гидравлические прессы, экскаваторы, металлорежущие станки и др.).
- Малая инерционность сокращает рабочий цикл и повышает производительность станка.
- Бесступенчатое регулирование скорости рабочих движений упрощает конструкцию привода и повышает коэффициент использования приводного двигателя.
- Преобразование без дополнительных устройств вращательного движения ведущего звена в поступательное движение ведомого звена.
- Надежность в работе благодаря отсутствию заклинивания за счет применения предохранительных клапанов.
- Применение стандартизованных и унифицированных покупных узлов снижает стоимость привода и упрощает его эксплуатацию и ремонт.
- Возможность автоматизации.
- Самосмазываемость. Недостатки гидропривода:
- Зависимость характеристики привода от вязкости рабочей жидкости, которая связана с изменением температуры.
- Растворимость в рабочей жидкости воздуха, который нарушает работу привода, особенно в автоматических устройствах.
- Внутренние и наружные утечки рабочей жидкости.
Гидросхема станка, обеспечивающая возвратно-поступательное движение стола 9, поршня 10 и его остановку в любом положении, показана на рис. 1. Электродвигатель 2 приводит во вращение насос 4, засасывающий масло из бака 1 по трубе 15 и подающий его под давлением через фильтр 6 и распределитель 7 в левую полость цилиндра 8. Из правой полости цилиндра масло через распределитель 7, дроссель 11 и трубопровод 13 попадает в бак.
Давление в гидросистеме настраивают предохранительным клапаном 3 и контролируют манометром 5. Если давление жидкости в клапане 3 преодолеет усилие его пружины, то жидкость будет проходить через клапан в бак. Если переключить распределитель 7, то масло, подаваемое насосом 4, будет через фильтр и распределитель поступать в правую полость цилиндра 8 и одновременно его левая полость соединится с баком. При этом направление движения стола 9 изменяется. Для остановки стола необходимо повернуть кран 12, в результате чего рабочая жидкость будет свободно сливаться в бак через трубу 14, и давление в гидросистеме уменьшится. Дроссель 11 позволяет изменять количество жидкости, проходящей из гидроцилиндра в единицу времени, и, следовательно, скорость движения стола.
Вместо гидропривода поступательного движения можно получить гидропривод вращательного движения, заменив гидроцилиндр 8 гидромотором.
Главный элемент гидропривода — ансос . Шестеренные насосы изготавливают нерегулируемыми и применяют в тех случаях, когда требуется сравнительно низкое давление масла (16–20 МПа). Шестеренный насос (рис. 2) состоит из ведущего 3 и ведомого 4 зубчатых колес, расположенных в корпусе. При вращении зубчатых колес масло в зону всасывания 1 засасывается сначала образующимся там вакуумом, а затем впадинами зубьев и переносится в зону нагнетания 2. Дальше масло поступает в гидросеть.
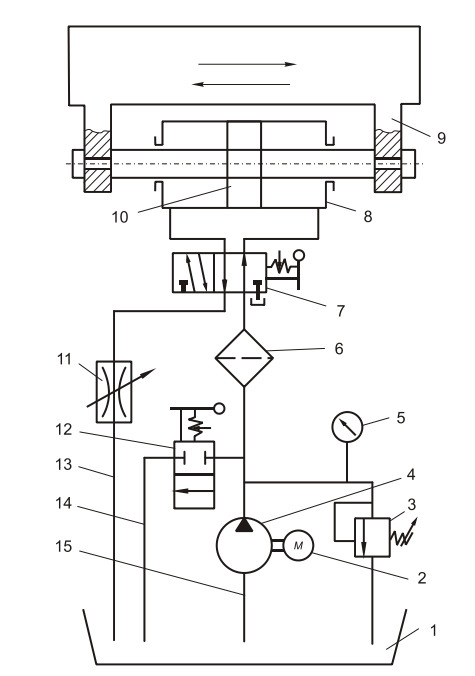
Рис. 1. Гидросхема станка
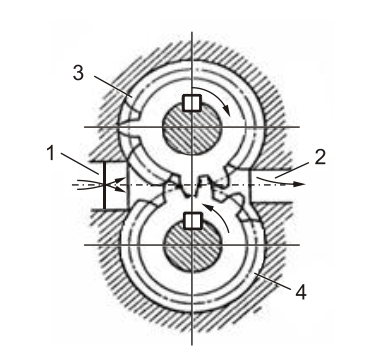
Рис. 2. Шестеренный насос
Пластинчатые насосы. Преимущественно пpимeняются нерегулируемые пластинчатые насосы, (давление до 32 МПа) которые просты по конструкции, компактны, отличаются равномерностью подачи масла и относительно высоким КПД. Пластинчатые насосы выпускают одно- и двухпоточными (с двумя независимыми потоками). В последних на общем приводном валу установлены два рабочих комплекта (одинаковых или различных), что обеспечивает возможность нагнетания масла двумя независимыми потоками.
Основные детали насосов: корпус, приводной вал с подшипниками и рабочий комплект (рис. 3), состоящий из распределительных дисков, статора 1, ротора 2 и пластин 3.
При вращении ротора 2, связанного через шлицевые соединения 4 с приводным валом, в направлении против часовой стрелки, пластины 3 центробежной силой и давлением масла, прижимаются к внутренней поверхности статора 1, имеющей форму овала, и, следовательно, совершают возвратно-поступательное движение в пазах ротора. Во время движения пластин от точки А до точки В и от точки С до точки D объем камер, образованных двумя соседними пластинами, внутренней поверхностью статора, наружной поверхностью ротора и торцовыми поверхностями дисков, увеличивается, и масло заполняет рабочие камеры через окна диска, связанные со всасывающей линией. При движении пластин на участках ВС и DA объем камер уменьшается, и масло вытесняется в напорную линию гидросистемы.
Рассмотрим принципиальную схему радиально-поршневых насосов (рис. 4), развивающих давление до 70 МПа.
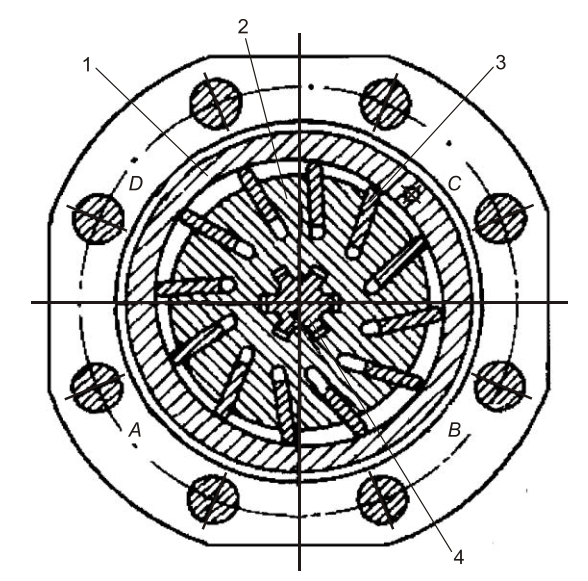
Рис. 3. Пластинчатый насос
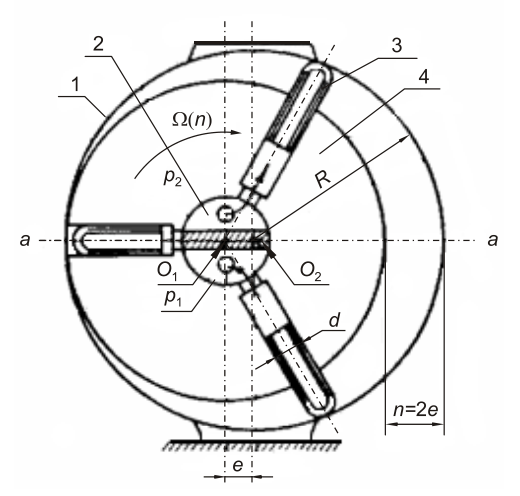
Рис. 4. Радиально-поршневой насос
Ротор 4 с радиально расположенными в нем поршнями 3 вращается внутри обоймы 1. Ось ротора смещена относительно оси обоймы на величину эксцентриситета е.
При вращении электродвигателем блока цилиндров 4 поршни 3, прижимаясь центробежными силами к обойме 1, совершают вращательное движение вокруг центра О1 и возвратно-поступательное движение в радиальном направлении. За один оборот каждый поршень совершает два хода по цилиндру: один рабочий (нагнетающий) и второй — нерабочий (всасывающий).
Поршни, соединенные с подводящей магистралью, засасывают жидкость из камеры Р2, поршни, соединенные с отводящей магистралью, нагнетают жидкость в рабочую камеру Р1. Камеры нагнетания и всасывания разделены перегородкой, ось которой совпадает с нейтральной осью насоса аа.
Производительность насоса зависит от величины эксцентриситета е. В регулируемых насосах эксцентриситет можно изменять как по величине, так и по знаку смещением обоймы 1 в направляющих. Смена знака эксцентриситета (смещение точки О2 влево от точки О1) вызовет изменение направления подачи насоса, при этом камеры нагнетания и всасывания поменяются местами.
Схемы аксиально-поршневых насосов (давление до 50 МПа) приведены на рис. 5. При вращении ротора 4 от вала 1 поршень 3 (рис. 5, а), взаимодействующий с неподвижной наклонной шайбой 2, совершает возвратно-поступательное движение. В установленном в корпусе насоса опорно-распределительном диске 5 имеются две полукольцевые канавки, расположенные таким образом, что полости под входящими в ротор поршнями соединены с напорной магистралью через канавку 7, а полости под выходящими из ротора поршнями — с всасывающей магистралью через канавку 6.
В некоторых конструкциях поршни 3 (рис. 5, б) связаны с шайбой 2 через специальные шарниры. Это обеспечивает всасывание масла при вращении вала с шайбой 2. При изменении угла наклона цилиндрового блока 4 вместе с опорно-распределительным диском 5 изменяется величина хода поршней и, следовательно, производительность насоса.
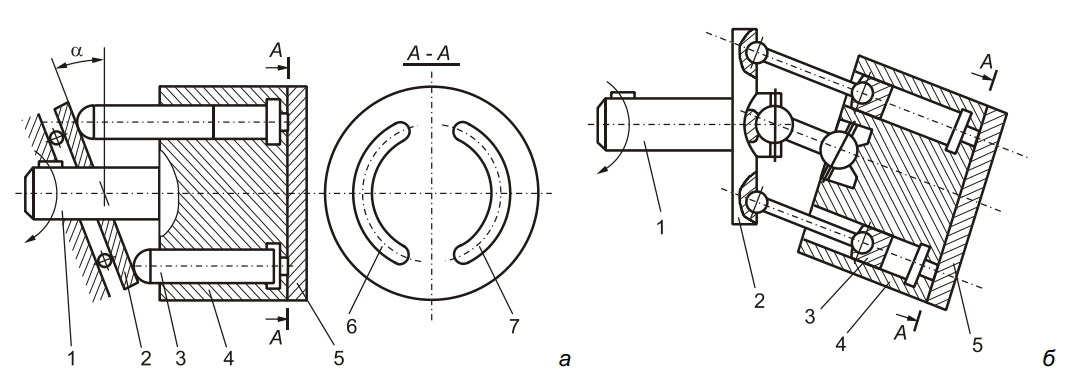
Рис. 5. Схемы аксиально-поршневых насосов: а — с наклонной шайбой; б — с наклонным блоком
Благодаря сферическому контакту поршней обеспечивается возможность передачи больших нагрузок на шайбу 2 и, следовательно, насос может развивать большое давление (около 40 МПа).
Поворотными гидродвигателями называют объемные гидродвигатели с ограниченным углом поворота выходного вала (рис. 6). Для осуществления поворотного движения рабочую жидкость (масло или эмульсию) попеременно подают в рабочие полости гидродвигателя.
Если рабочий орган машины должен совершать поступательное движение, то исполнительным механизмом будет гидравлический цилиндр (рис. 7).
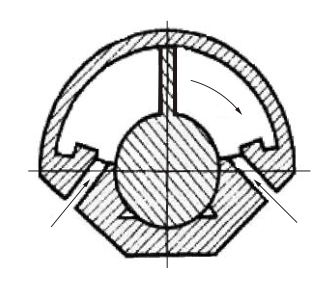
Рис. 6. Поворотный гидродвигатель

Рис. 7. Гидравлический цилиндр
Гидроцилиндр изготовлен из бесшовной стальной трубы 1, на концах которой в наружных проточках вставлены полукольца 6. На эти полукольца опираются лапы 7, к которым болтами крепят головки 5 и 8. Головка 5 имеет отверстие, через которое проходит шток 3, уплотняемый сальником и фланцем 4. С обеих сторон поршня есть тормозные плунжеры 2 и 11, которые в конце хода поршня входят в выточки а и б в головках 5 и 8, создающие гидравлический буфер. Конические поверхности на концах плунжеров служат для гашения гидравлического удара при входе плунжера в выточку. Рабочая жидкость в начальном положении поршня (когда отверстие в головке закрыто плунжером) поступает в полость цилиндра через обратный клапан 10, а в конце хода поршня сливается через дроссель 9.
Гидроаппаратура обеспечивает надежную работу и управление гидроприводом. Фильтры очищают масло от твердых частиц. Предохранительные клапаны не позволяют давлению масла превысить установленное значение, предохраняют систему от перегрузки. Дроссели служат для регулирования скорости движения рабочего органа путем изменения площади канала. Изменять скорость можно также, применяя регулируемые насосы и гидродвигатели. Распределители предназначены для изменения направления движения и остановки рабочего органа. Обратные клапаны не позволяют потоку жидкости двигаться в обратном направлении. К числу дополнительных устройств относятся регуляторы расхода, давления, температуры, а также реле давления, уровня жидкости, температуры. Заводы изготавливают также комплектные насосные станции, содержащие электродвигатель, насос, фильтр, предохранительный клапан и др., смонтированные на баке.
3. Пневматический привод
Пневмопривод использует энергию сжатого воздуха. На машиностроительных заводах имеется сеть трубопроводов сжатого воздуха давлением 0,4–0,6 МПа, создаваемого компрессорами, приводимыми в действие электродвигателями.
Основные преимущества пневматических приводов:
- надежность;
- быстродействие;
- простота конструкции;
- экономичность;
- дешевизна энергоносителя (воздуха);
- возможность бесступенчатого регулирования скорости исполнительных органов привода в широких пределах;
- безопасность в пожарном отношении.
Главный недостаток пневмопривода на машиностроительных заводах — низкое (в 100 раз меньше, чем у гидропривода) давление, не позволяющее получать больших усилий. Однако пневмоприводы имеют и ряд других недостатков, связанных в основном с высокой сжимаемостью воздуха. Энергия сжатого воздуха, преобразуемая в кинетическую энергию движущихся масс, вызывает рывки и удары, снижающие точность позиционирования выходных звеньев исполнительных органов станка. Поэтому пневмоприводы не обеспечивают необходимой плавности и точности хода, а также получения при переменной нагрузке равномерной и стабильной скорости перемещения исполнительных органов станков. Пневмоприводы, как правило, имеют более низкий (по сравнению с гидроприводом) КПД, а также требуют применения смазывающих устройств.
Исполнительными механизмами (почти как и в гидроприводе) являются пневмоцилиндры и мембранные исполнительные механизмы-пневмокамеры (для поступательного движения, рис. 8), пневмомоторы (для вращательного движения, рис. 9) и поворотные исполнительные механизмы (поворот на угол менее 360°, рис. 10).
Пневмокамеры срабатывают при подаче сжатого воздуха в отверстие К1/4″. Поршень, уплотненный резиновой диафрагмой движется вверх, увлекая за собой тягу d; после сброса давления пружина возвращает поршень вниз. Остальные пневмоприводы действуют подобно аналогичным гидравлическим. В качестве пневмомоторов применяют пластинчатые, поршневые и реже шестеренные, центробежные и другие машины.
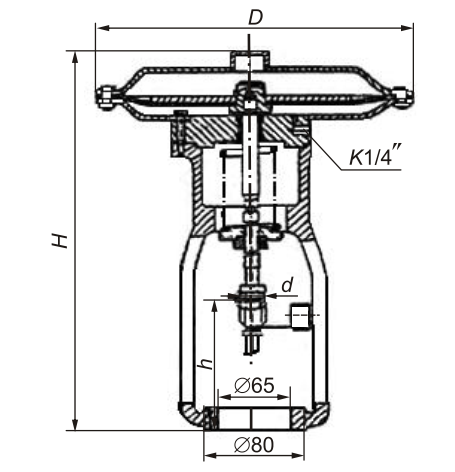
Рис. 8. Пневмокамера
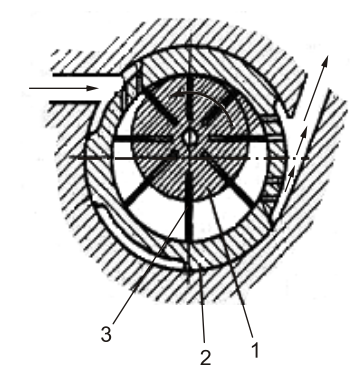
Рис. 9. Схема пластинчатого пневмомотора: 1 — ротор; 2 — статор; 3 — пластина
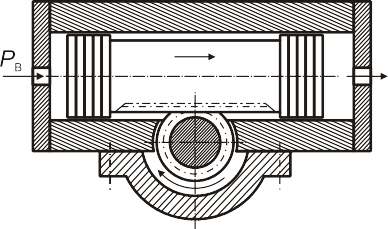
Рис. 10. Поворотный пневмоцилиндр (Рв — давление воздуха)
Промышленность выпускает следующую пневмоаппаратуру: фильтры, влагоотделители, предохранительные клапаны, дроссели, распределители, обратные и редукционные клапаны, регуляторы и реле давления. Заводы изготавливают также устройства очистки сжатого воздуха, глушители и др.
В цехах пневмопривод используется в приспособлениях для зажима заготовок совместно с усиливающими рычажными, винтовыми и клиновыми механизмами, а также для привода манипуляторов.
С помощью пневматических устройств решают сложные задачи автоматизации и управления станками.
Пневматические приводы загружают заготовки, включают и выключают рабочие движения режущего инструмента, тормозят рабочие органы станка при их остановке, освобождают и удаляют заготовки со станка, служат в качестве аэростатических опор и направляющих, а также выполняют другие функции. При применении сдвоенных (тандемы) и строенных пневмоцилиндров их общего усилия может быть достаточно и для решения технологических задач.
Пневмогидравлический привод позволяет получить бóльшие усилия, чем пневматический. Воздух действует на поршень большого диаметра, который плунжером малого диаметра вытесняет масло под более высоким давлением, поступающее в гидроцилиндр.
4. Механизмы приводов
Передающие механизмы (или передачи) передают движение от одного элемента привода к другому. Применяют ременные, цепные, зубчатые и червячные передачи. В них различают ведущий элемент (передающий движение) и ведомый элемент (получающий движение). Характеристикой передачи служит передаточное число, с помощью которого можно определить, во сколько раз частота вращения ведомого элемента меньше частоты вращения ведущего.
Ременная передача (рис. 11, а и 12, а) состоит из ведущего 1 и ведомого 2 шкивов и плоского (рис. 12, б), круглого (рис. 12, в) или клинового (рис. 12, г) ремня 3. Ее передаточное число u = ω1/ω2 = d2/d1(1–ε), где d1, d2 — диаметры ведущего и ведомого шкивов, мм; ε = 0,96…0,9 — коэффициент, учитывающий проскальзывание ремня относительно поверхностей шкивов.
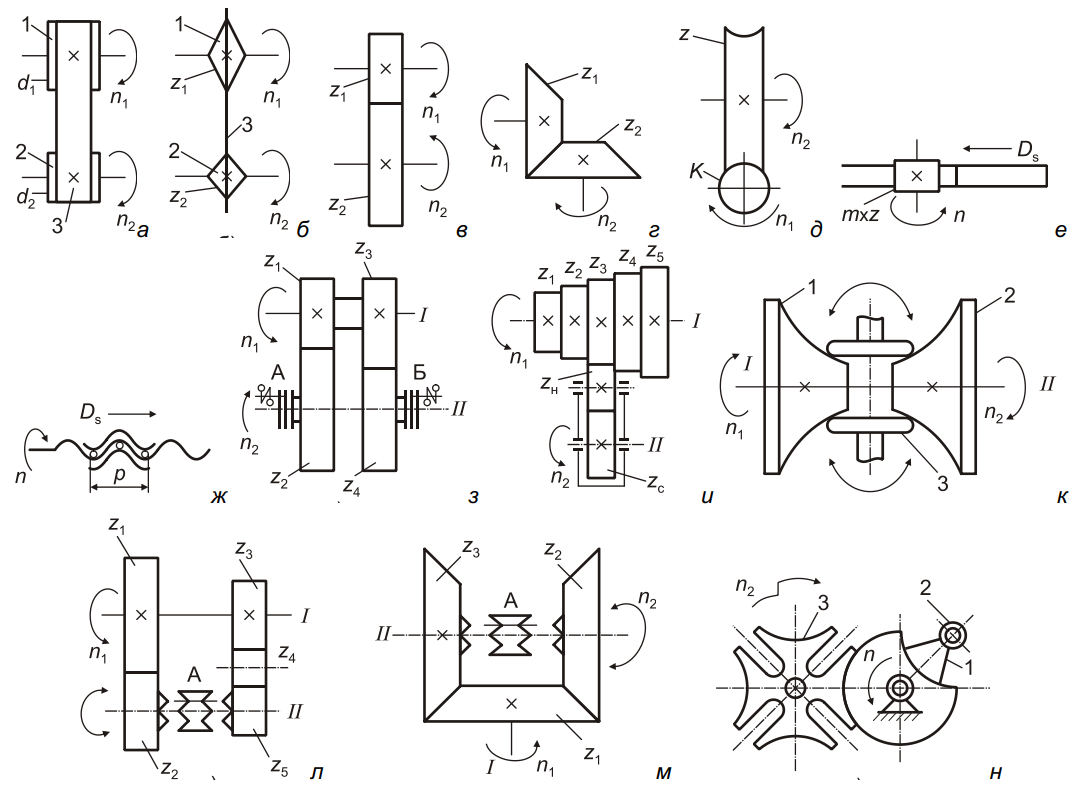
Рис. 11. Схематическое изображение передач: а — ременная; б — цепная; в — зубчатая цилиндрическая; г — коническая; д — червячная; е — реечная; ж — «винтгайка»; з–к — механизмы для изменения скорости; л, м — механизмы для изменения направления; н — механизм для осуществления периодических движений
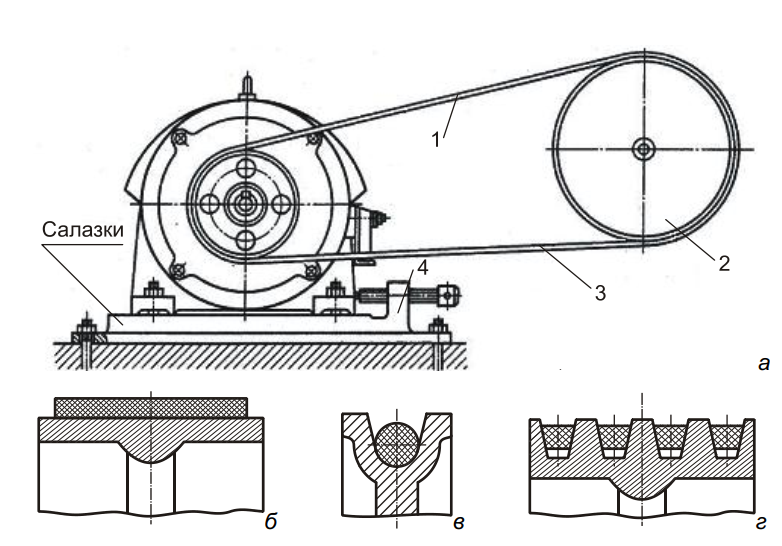
Рис. 12. Схемы ременной передачи (а) и сечения ремней (б–г)
Там, где проскальзывание нежелательно, применяют зубчатые ремни 3 (рис. 13) и зубчатые шкивы 1 и 2.
Фрикционной передачей называют механизм, в котором движение одного жесткого звена преобразуется в движение другого жесткого звена за счет сил трения в одной или нескольких зонах контакта (сопряжения). Необходимую силу трения между звеньями механизма обеспечивает прижатие одного из них к другому, т. е. силовое замыкание. Такие механизмы применяют преимущественно для преобразования параметров вращательного движения.
На рис. 14 показан лобовой вариатор, в котором ведущий каток 1 может перемещаться по своему валу (вдоль оси) в осевом направлении (как показано стрелками). Передаточное отношение этого вариатора будет непрерывно (бесступенчато) изменятьcя по мере изменения радиуса R. Если каток 1 находится на «оси» катка 2, то последний неподвижен. При переводе катка 1 в левую часть катка 2 поменяется направление вращения ведомого вала (реверсивное вращение). Имеется много других типов вариаторов (схема одного из них приведена на рис. 11, к).
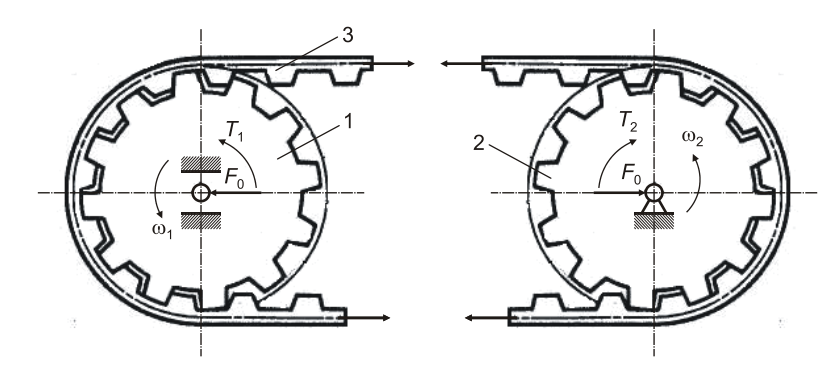
Рис. 13. Схема зубчато-ременной передачи
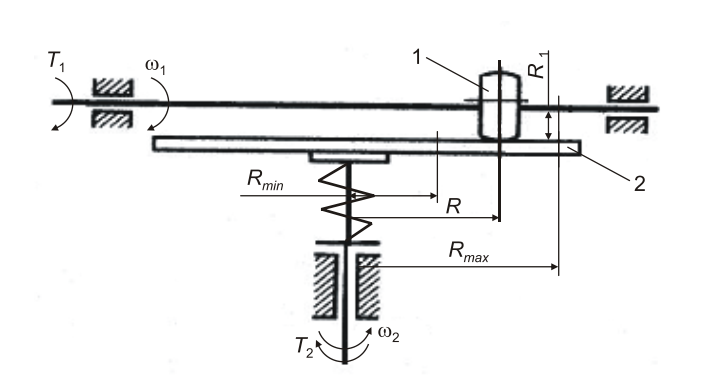
Рис. 14. Вариатор
Цепная передача (рис. 15 и 11, б) включает ведущую 1 и ведомую 2 звездочки и цепь. Проскальзывание здесь отсутствует.
Зубчатая передача осуществляется цилиндрическими (рис. 16, а и 11, в) или коническими (рис. 17, а и 11, г) зубчатыми колесами.
Передаточное число цепной и зубчатой передач u = Z2/Z1, где Z1 и Z2 — числа зубьев ведущего и ведомого элементов соответствующих передач. Для цилиндрических передач рекомендуется u = 2–7. Если ведущее колесо меньше ведомого, то угловая скорость ω уменьшается, а крутящий момент М = ηР/ω растет.
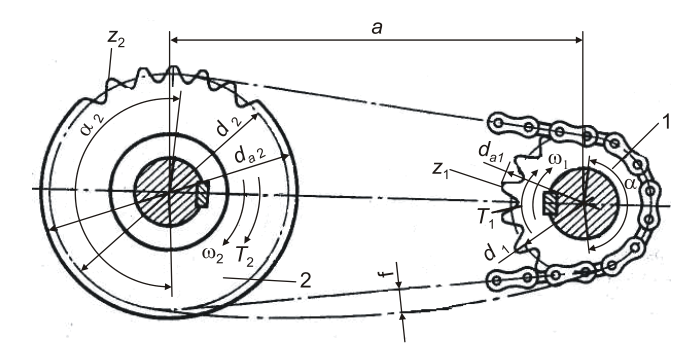
Рис. 15. Схема цепной передачи
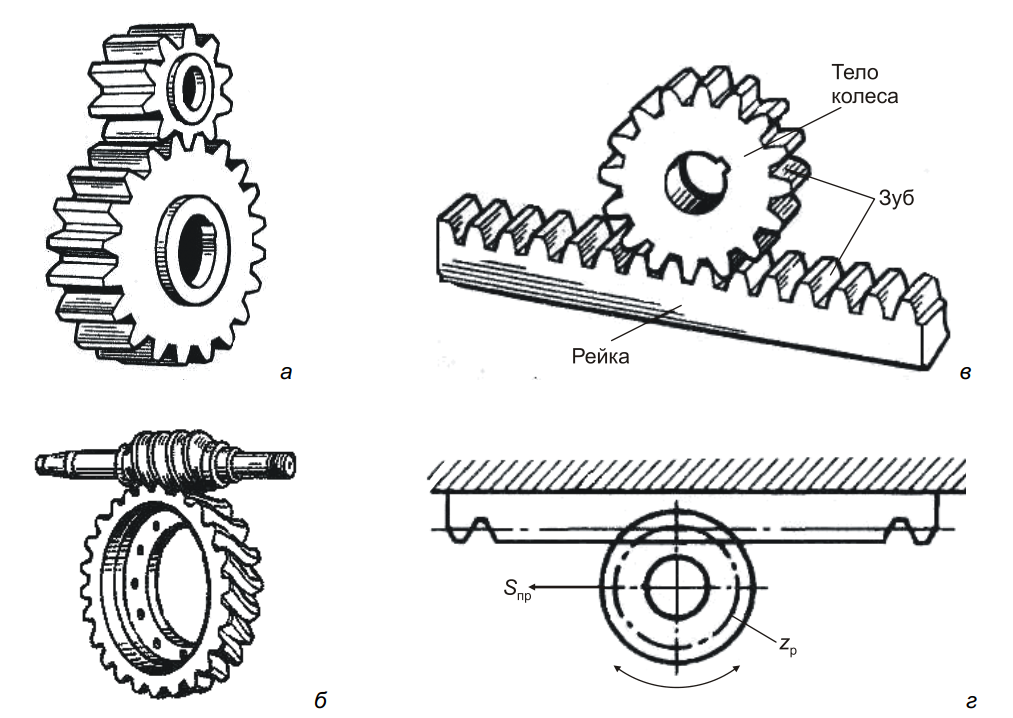
Рис. 16. Прямозубые цилиндрическая зубчатая (а, б) и реечная передачи (в, г)
Здесь η = 0,97 — КПД цилиндрической передачи. Он очень высок, т. к. зубья перекатываются друг по другу с небольшим проскальзыванием. Имеются также винтовые (рис. 17, в) передачи и передачи внутреннего зацепления (рис. 17, г).
Червячная передача (рис. 17, б) состоит из ведущего червяка (он сверху), имеющего k заходов, и ведомого червячного колеса с Z зубьями. Ее передаточное число u = Z/k. Червячная передача позволяет получать большие передаточные числа. Если Z = 40, а k = 1, то u = 40 (для цилиндрической передачи u = 2–7).
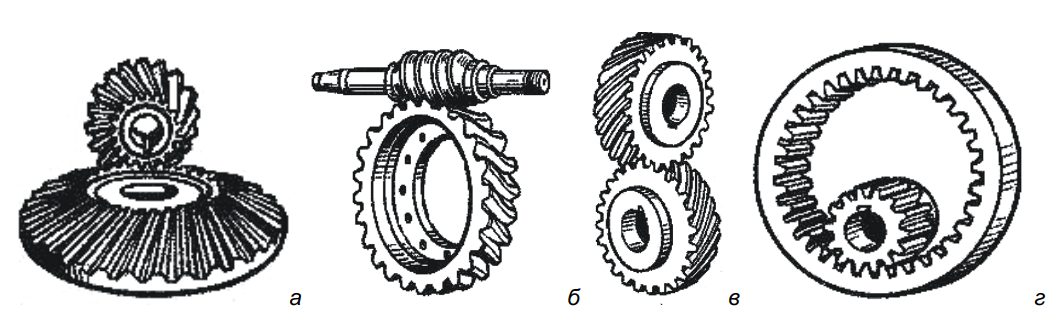
Рис. 17. Зубчатые передачи: а — коническая; б — червячная; в — винтовая; г — цилиндрическая с внутренним зацеплением
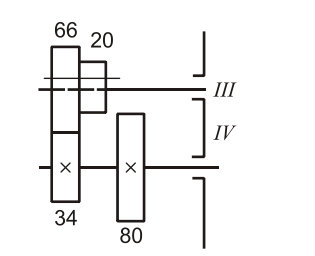
Рис. 18. Фрагмент коробки скоростей
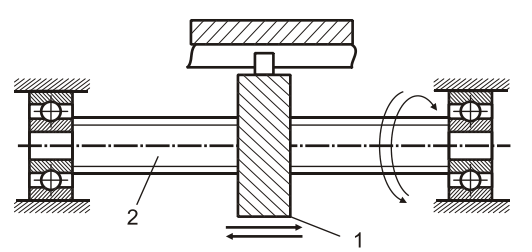
Рис. 19. Передача «винт-гайка»
Но Z можно взять еще больше. Низкий КПД червячной передачи (η = 0,65–0,8) является следствием трения скольжения между витками червяка и зубьями колеса.
Скорость вращения можно изменять пересцеплением зубчатых колес в коробке скоростей (рис. 18). Здесь цифры указывают на число зубьев у колес. Кресты означают неподвижное закрепление колес 34 и 80 на валу V. Горизонтальная тонкая линия, параллельная валу , означает, что блок колес 66–20 может перемещаться вдоль вала . В изображенном положении передаточное число с вала на V равно 66/34 и вал V будет вращаться почти в два раза быстрей, чем вал . Переместим блок вправо до сцепления колес 20 и 80. Теперь передаточное число равно 80/20 и вал V будет вращаться в четыре раза медленней, чем вал . Если валов в коробке скоростей 4 и на каждом имеется по двойному блоку, то число скоростей будет равно 2 · 2 · 2 · 2 = 16, а ведь блоки бывают и тройными. У автоматов зубчатые колеса сцеплены в нужных сочетаниях, но вращаются на валах свободно и сцепляются с валами сцепными муфтами (рис. 11, з). В коробках подач станков скорости можно менять с помощью «нортона» (рис. 11, и). Ведущий вал — , ведомый вал — . По мере сдвигания «нортона» вправо скорость ведомого вала растет.
Механизмы для изменения направления вращения (реверсирования) многообразны. В качестве примера на рис. 11, л и м приведены механизмы реверсирования за счет переключения муфты. Для преобразования вращательного движения в поступательное применяют несколько видов механизмов.
Реечная передача (рис. 16, в и г) состоит из зубчатого колеса, имеющего Z зубьев, и зубчатой рейки. Если модуль реечного зацепления m, а вращательное движение совершает зубчатое колесо, то за один его оборот рейка перемещается на расстояние S = π m Z.
Винтовая передача (рис. 19 и 11, ж) состоит из ходового винта 2 с шагом Р и ходовой гайки 1. В cтанках с программным управлением используют шариковые винтовые пары, которые имеют высокие точность и КПД. За один оборот ходового винта, имеющего k заходов, гайка перемещается на расстояние S = P k.
Кривошипно-ползунный механизм (рис. 20) широко применяется в кривошипных прессах для горячей и холодной штамповки. Здесь при обороте кривошипа 2 ползун 1 движется поступательно и производит штамповку. В двигателях внутреннего сгорания, наоборот, газы в цилиндрах давят на поршни 1, которые, воздействуя на шатуны ВС, вращают коленвал 2.
Кулисный механизм (рис. 21) трансформирует вращательное движение в поступательное в поперечно-строгальных станках и др.
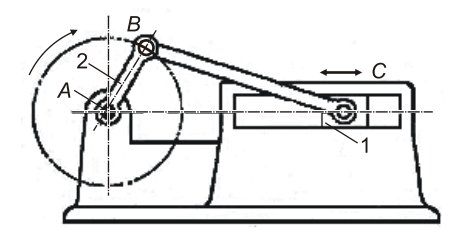
Рис. 20. Кривошипно-ползунный механизм
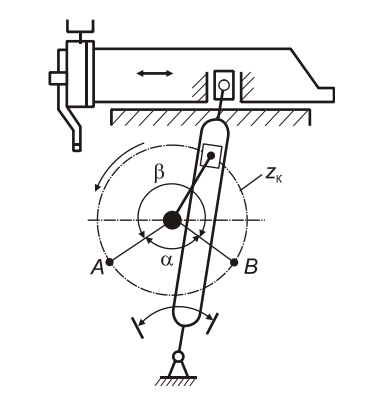
Рис. 21. Кулисный механизм
При вращении кривошипа 1 ползун 2 перемещается по направляющим кулисы 3, качающейся на оси 4. Ползун станка 5 с резцом 6 под действием кулисы движется возвратно-поступательно.
В приводах движения подачи и во вспомогательных кинематических цепях широко применяют кулачковые механизмы. При этом характер движения ведомого звена может быть установлен соответствующим профилированием кулачка.
Кулачки могут быть связаны с подвижным рабочим органом непосредственно (рис. 22, а) или через промежуточную передачу (рис. 22, б). В первом случае кулачок 4 действует на палец 3, жестко связанный с рабочим органом (например, суппортом станка) 2. Пружина 1 обеспечивает контакт ролика с кулачком и осуществляет обратный ход суппорта. Во втором случае вращающийся на оси 5 плоский кулачок 4 находится в контакте с роликом двухплечего рычага 3, имеющего зубчатый сектор, связанный с рейкой 2. При повороте рычага 3 с сектором вокруг точки О суппорт 1 пeремещается в направлении, показанном стрелкой.
Форма профиля кулачков зависит от принятого закона движения исполнительного органа. Рабочие участки профиля, осуществляющего равномерное перемещение ведомого звена (например, движение подачи), очерчивают по спирали Архимеда. Обычно кулачок вращается равномерно, следовательно, угол поворота и приращение радиуса кривизны, а с ним и перемещение рабочего органа будут пропорциональны времени.
Механизмы с цилиндрическим кулачком 1 (рис. 22, в, г) применяются, например, в устройствах подачи заготовки токарных автоматов (2 — палец; 3 — подающий механизм; 4 — рычаг).
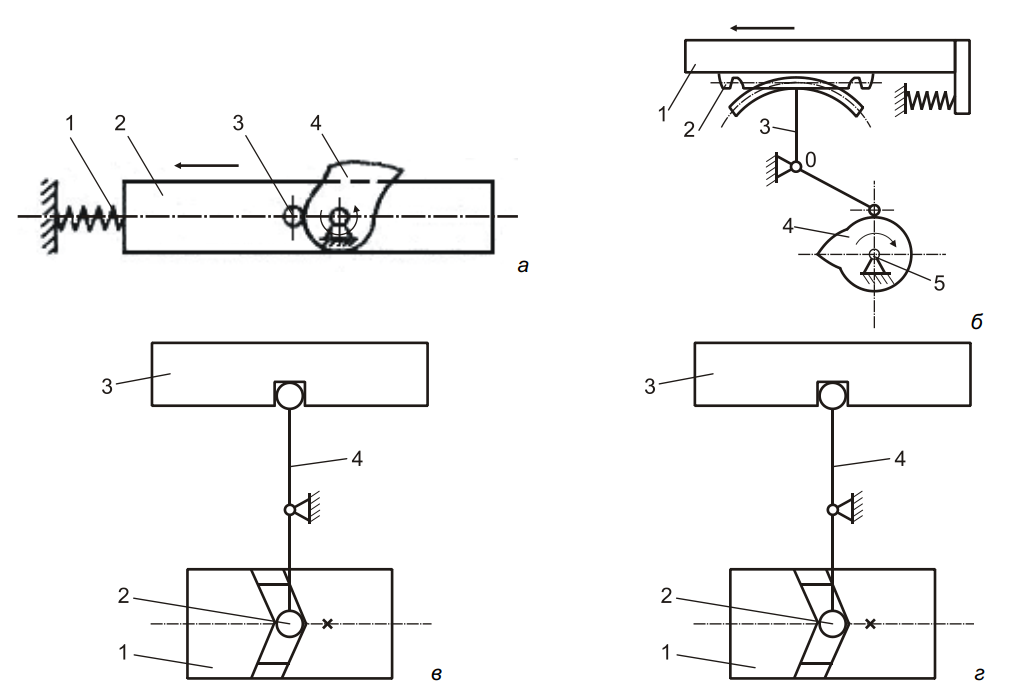
Рис. 22. Кулачковые механизмы
В ряде случаев вращение одному валу от двух самостоятельных приводов может быть передано одновременно через механизм обгона (рис. 23) — двустороннюю муфту свободного хода. Движение валу 1 против или по часовой стрелке может передаваться с малой скоростью от колеса 2, закрепленного на ступице барабана 3, или же с большей скоростью от колеса 5.
При движении колеса 2 по стрелке ролики 7 заклиниваются и вилки 4 с колесом 5 вращаются вхолостую. При передаче движения от колеса 5 в ту же сторону, с большей скоростью вилка 4 передает движение валу 1 через ролики 6, упирающиеся в выступ звездочки 8. При вращении колеса 5 в направлении, противоположном колесу 2, вилка 4 передает движение валу 1 через ролик 7. Таким образом, независимо от вращения колеса 2 валу 1 можно передавать движение с большей скоростью в двух направлениях.
Для осуществления периодических движений используют храповые и мальтийские механизмы (см. рис. 11, н). Первые применяют в тех случаях, когда необходимо осуществлять прерывистые движения рабочих органов в течение коротких промежутков времени.
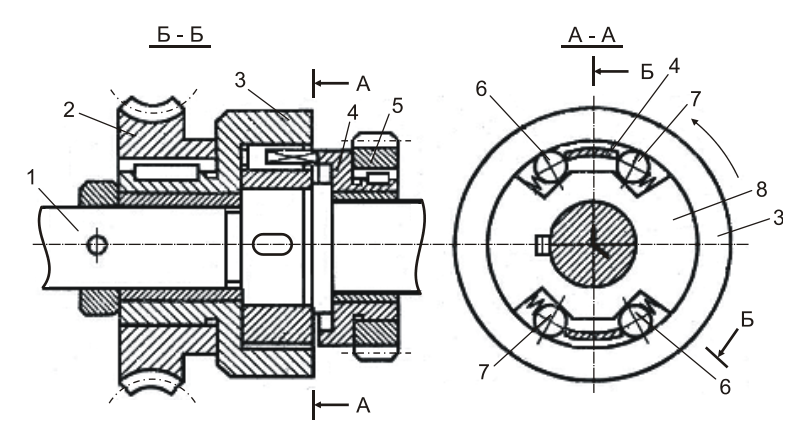
Рис. 23. Двусторонняя муфта свободного хода
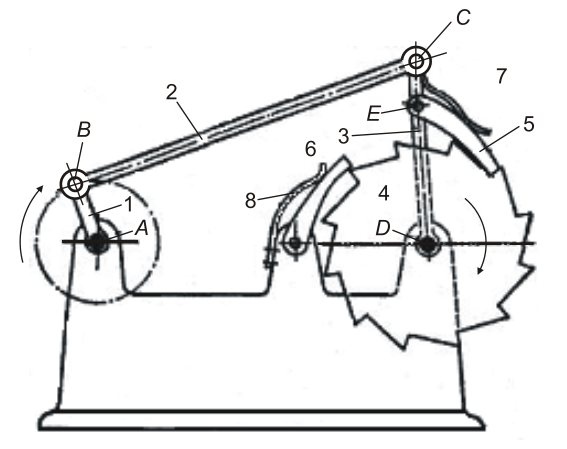
Рис. 24. Храповой механизм
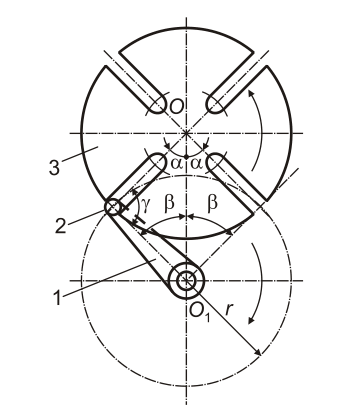
Рис. 25. Мальтийский механизм
Храповой механизм (рис. 24) работает так. Кривошип 1 вращается непрерывно. Рычаг 3 под действием шатуна 2 с собачкой 5 получает качательное движение. При движении вправо собачка 5, прижимаемая к храповому колесу 4 пружиной 7, захватывает зубья храпового колеса 4 и поворачивает его вокруг оси D. При движении рычага 3 влево собачка 5 проскальзывает по зубьям колеса 4, которое удерживается от поворота в обратном направлении собачкой 6, прижимаемой к колесу 4 пружиной 8.
Мальтийские механизмы (рис. 25) предназначены для периодического поворота. Они состоят из кривошипа 1 с цевкой 2 на конце и диска 3, имеющего радиальные пазы. Кривошип вращается непрерывно. В определенный момент цевка входит в паз и, повернувшись на угол 2β вместе с диском 3, выходит из него. Диск 3 останавливается до попадания цевки 2 в следующий паз.
Муфты служат для соединения валов агрегатов, например электродвигателя и редуктора. Глухие муфты (рис. 26) требуют точного совпадения осей соединяемых валов. Когда достичь этого трудно применяют компенсирующие муфты (рис. 27 и 28): упруго-пальцевую (ведущие пальцы 2 облицованы резиновыми кольцами или втулками 1), дисковую (диск 2, проскальзывая по пазам полумуфт 1 и 3, компенсирует несовпадение осей валов) и др.
Для соединения вращающегося вала с невращающимся применяют сцепные муфты, например фрикционную дисковую (рис. 29, изображена в выключенном положении). Один из валов вращается, другой — нет. Диски 1 наружными шлицами входят в пазы буксы 3, сидящей на левом валу.
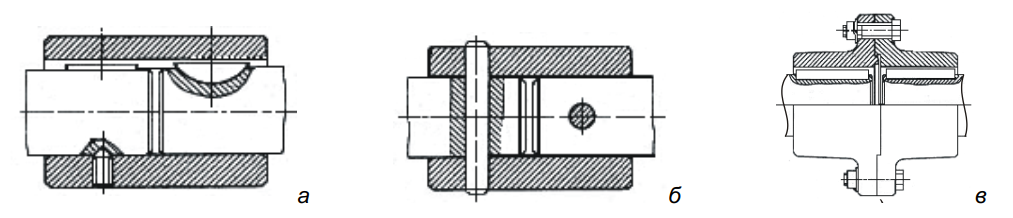
Рис. 26. Глухие муфты
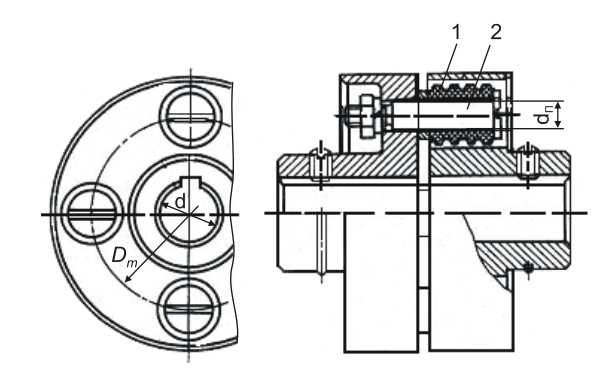
Рис. 27. Упругая пальцевая муфта
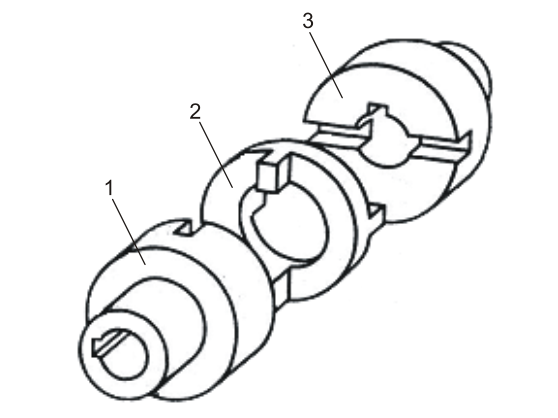
Рис. 28. Дисковая муфта
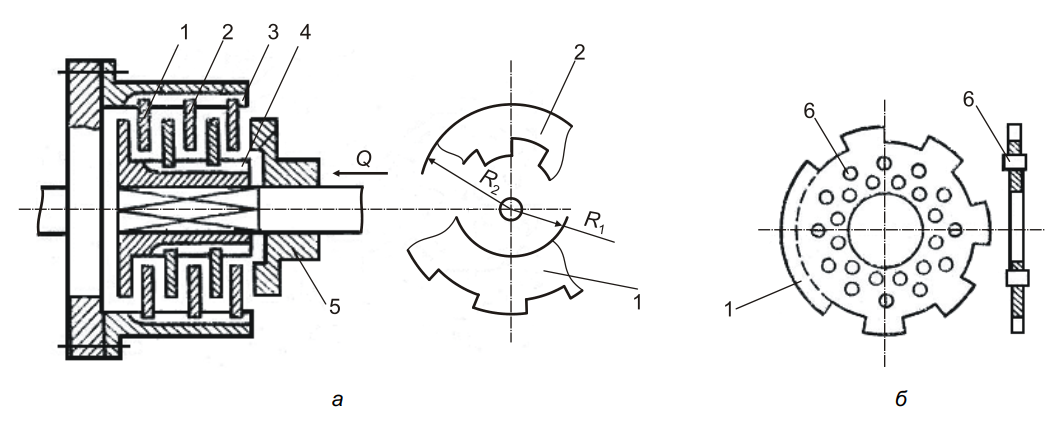
Рис. 29. Фрикционная дисковая сцепная муфта
Диски 2 внутренними шлицами входят в пазы втулки 4, сидящей на правом валу. Чтобы сцепить валы, втулка 5 вручную рычагом или автоматически (например, магнитом) с силой Q сжимает диски 1 и 2. Между дисками возникают силы трения, и вращение передается с вращавшегося вала на ранее неподвижный. Вставки 6 выполнены из материалов, увеличивающих силу трения.