Понимание широтно-импульсной модуляции (pwm) в микроконтроллерах atmega16 / 32 avr
Широтно-импульсная модуляция (ШИМ) — это мощный метод, при котором ширина импульса изменяется за счет сохранения постоянной частоты. Сегодня этот метод используется во многих системах управления. Применение ШИМ не ограничено, и он используется в широком диапазоне приложений, таких как управление скоростью двигателя, измерение, управление мощностью и связь и т. Д. В методе ШИМ можно легко генерировать аналоговый выходной сигнал с использованием цифровых сигналов. Это руководство поможет вам понять ШИМ, его терминологию и то, как мы можем реализовать его с помощью микроконтроллера. В этом уроке мы продемонстрируем ШИМ с микроконтроллером AVR Atmega16, изменяя яркость светодиода.
Чтобы подробно понять основы ШИМ, перейдите к нашим предыдущим руководствам по ШИМ с различными микроконтроллерами:
- ARM7-LPC2148 PWM Учебное пособие: Управление яркостью светодиода
- Широтно-импульсная модуляция (ШИМ) с использованием MSP430G2: управление яркостью светодиода
- Генерация ШИМ с использованием микроконтроллера PIC с MPLAB и XC8
- Широтно-импульсная модуляция (PWM) в STM32F103C8: управление скоростью вентилятора постоянного тока
- Генерация сигналов ШИМ на выводах GPIO микроконтроллера PIC
- Учебное пособие по Raspberry Pi PWM
Контакты PWM в микроконтроллере AVR Atmega16
Atmega16 имеет четыре выделенных контакта PWM. Это контакты PB3 (OC0), PD4 (OC1B), PD5 (OC1A), PD7 (OC2).

Также Atmega16 имеет два 8-битных таймера и один 16-битный таймер. Timer0 и Timer2 — это 8-битные таймеры, а Timer1 — 16-битные. Чтобы сгенерировать ШИМ, мы должны иметь обзор таймеров, поскольку таймеры используются для генерации ШИМ. Как мы знаем, частота — это количество циклов в секунду, с которыми работает таймер. Таким образом, более высокая частота даст нам более быстрый таймер. При генерации ШИМ более высокая частота ШИМ даст более точный контроль над выходом, поскольку он может быстрее реагировать на новые рабочие циклы ШИМ.
В этом руководстве по Atmega16 PWM мы будем использовать Timer2. Вы можете выбрать любой рабочий цикл. Если вы не знаете, что такое рабочий цикл в ШИМ, давайте кратко обсудим.
Что такое сигнал ШИМ?
Широтно-импульсная модуляция (ШИМ) — это цифровой сигнал, который чаще всего используется в схемах управления. Время, в течение которого сигнал остается на высоком уровне, называется «временем включения», а время, в течение которого сигнал остается низким, называется «временем выключения». Ниже описаны два важных параметра ШИМ:
Рабочий цикл ШИМ
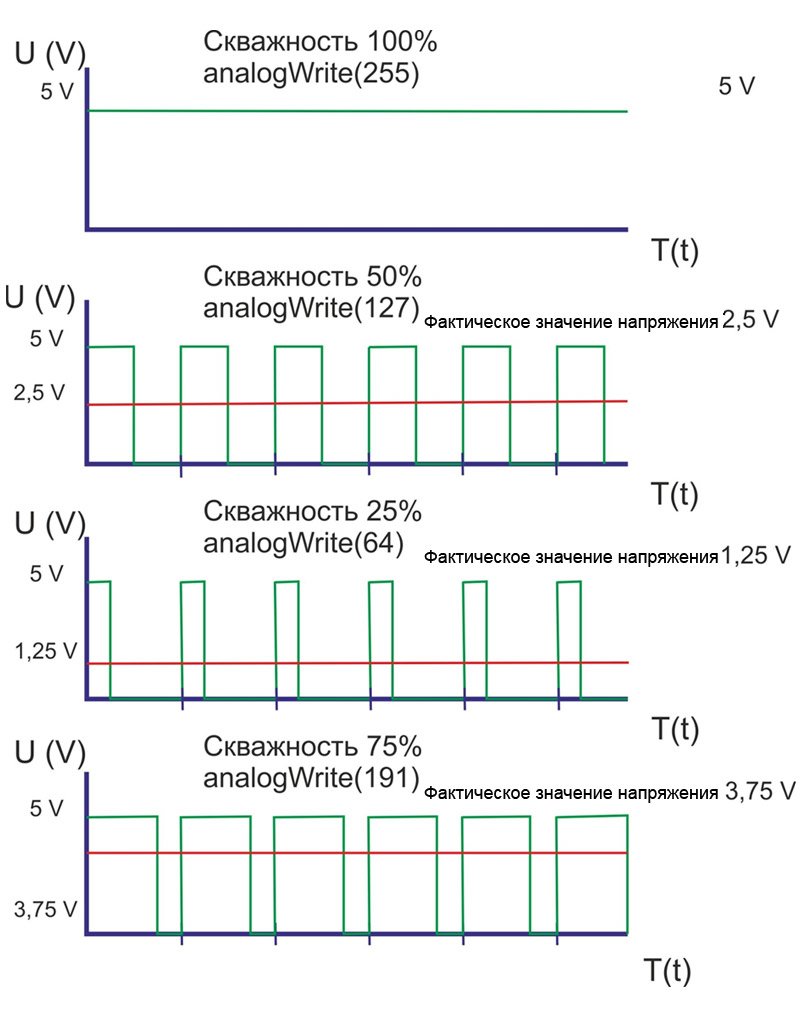
Процент времени, в течение которого сигнал ШИМ остается ВЫСОКИМ (по времени), называется рабочим циклом.
Как и в импульсном сигнале 100 мс, если сигнал ВЫСОКИЙ в течение 50 мс и НИЗКИЙ в течение 50 мс, это означает, что импульс был половину времени ВЫСОКИЙ, а половину — НИЗКИЙ. Таким образом, можно сказать, что рабочий цикл составляет 50%. Точно так же, если импульс находится в ВЫСОКОМ состоянии 25 мс и 75 мс в НИЗКОМ состоянии из 100 мс, то рабочий цикл будет 25%. Обратите внимание, что мы рассчитываем только длительность ВЫСОКОГО состояния. Вы можете использовать изображение ниже для визуального понимания. Формула для рабочего цикла тогда:
Рабочий цикл (%) = время включения / (время включения + время выключения)

Таким образом, изменяя рабочий цикл, мы можем изменить ширину ШИМ, что приведет к изменению яркости светодиода. У нас будет демонстрация использования различных рабочих циклов для управления яркостью светодиода. Посмотрите демонстрационное видео в конце этого урока.
После выбора рабочего цикла следующим шагом будет выбор режима ШИМ. Режим ШИМ определяет, как вы хотите, чтобы ШИМ работал. В основном существует 3 типа режимов ШИМ. Это следующие:
- Быстрая ШИМ
- ШИМ с фазовой коррекцией
- ШИМ с коррекцией фазы и частоты
Быстрая ШИМ используется там, где изменение фазы не имеет значения. Используя Fast PWM, мы можем быстро выводить значения PWM. Быстрый ШИМ не может использоваться там, где изменение фазы влияет на работу, такую как управление двигателем, поэтому в таком приложении используются другие режимы ШИМ. Поскольку мы будем контролировать яркость светодиода, где изменение фазы не будет сильно влиять, мы будем использовать режим Fast PWM.
Теперь, чтобы сгенерировать ШИМ, мы будем управлять внутренним таймером, чтобы он подсчитывал, а затем сбрасывал его на ноль при определенном подсчете, поэтому таймер будет считать, а затем снова и снова сбрасывать его на ноль. Это устанавливает период. Теперь у нас есть возможность управлять импульсом, включать импульс на определенный счет в таймере, пока он идет вверх. Когда счетчик вернется к 0, выключите импульс. Это дает большую гибкость, потому что вы всегда можете получить доступ к счетчику таймера и предоставить разные импульсы с помощью одного таймера. Это замечательно, если вы хотите управлять несколькими светодиодами одновременно. Теперь приступим к сопряжению одного светодиода с Atmega16 для ШИМ.
Проверьте все проекты, связанные с ШИМ здесь.
Необходимые компоненты
- Микроконтроллер Atmega16 AVR IC
- Кристаллический осциллятор 16 МГц
- Два конденсатора по 100 нФ
- Два конденсатора 22 пФ
- Нажать кнопку
- Перемычки
- Макетная плата
- USBASP v2.0
- 2 светодиода (любого цвета)
Принципиальная электрическая схема

Мы используем OC2 для ШИМ, то есть Pin21 (PD7). Поэтому подключите один светодиод к выводу PD7 Atmega16.

Программирование Atmega16 для ШИМ
Полная программа представлена ниже. Запишите программу в Atmega16, используя JTAG и Atmel studio, и посмотрите, как на светодиодах появляется ШИМ-эффект. Его яркость будет увеличиваться и медленно уменьшаться из-за изменяющегося рабочего цикла ШИМ. Посмотрите видео, приведенное в конце.
Начните программировать Atmega16 с настройки регистра Timer2. Биты регистра Timer2 выглядят следующим образом, и мы можем соответственно устанавливать или сбрасывать биты.

Теперь мы обсудим все части Timer2, чтобы мы могли получить желаемый PWM с помощью написанной программы.
В основном регистр Timer2 состоит из четырех частей:
FOC2 (принудительное сравнение вывода для таймера 2): бит FOC2 устанавливается, когда биты WGM определяют режим без ШИМ.
WGM2 (режим генерации волны для таймера 2): эти биты управляют последовательностью счета счетчика, источником максимального (TOP) значения счетчика и используемым типом генерации сигнала.
COM2 (режим вывода сравнения для таймера 2): эти биты управляют поведением вывода. Полное описание битов поясняется ниже.
TCCR2 — = (1 <
Установите биты WGM20 и WGM21 на ВЫСОКИЙ, чтобы активировать быстрый режим ШИМ. WGM означает режим генерации сигналов. Биты выбора указаны ниже.
Как рассчитать ширину импульса
Ширина импульса — это длина активации в сигнале. Эта спецификация используется для определения общего сигнала, генерируемого конкретным напряжением в течение его рабочего цикла. Этот расчет широко используется в области электроники, техники и анализа сигналов. По своей сути определение длительности импульса представляет собой расчет отношения. Это соотношение — количество времени, за цикл, когда сигнал активно подает напряжение.
Создайте соотношение, которое помещает продолжительность цикла в числитель и длину всего цикла в знаменатель.
Умножьте результат на 100 процентов. Это дает ширину импульса рабочего цикла. Этот процент может быть использован позже для определения общего напряжения сигнала с учетом значения входного напряжения.
Как рассчитать высоту, ширину и квадратные футы
Научитесь измерять высоту и ширину объекта прямоугольной формы для расчета квадратных футов. Квадратные метры — это прямая мера площади объекта или размера его поверхности. Типичные единицы измерения ширины и высоты, полученные с помощью рулетки, включают дюймы и футы. Обычно дюйм на рулетке сломан .
Как сила импульса влияет на движущийся объект?

Импульс описывает объект в движении и определяется произведением двух переменных: массы и скорости. Масса — вес объекта — обычно измеряется в килограммах или граммах для проблем с импульсом. Скорость — это мера пройденного времени и обычно указывается в метрах в секунду. .
Как рассчитать изменение импульса

Как рассчитать изменение импульса. Импульс объекта является произведением его скорости и массы. Количество описывает, например, воздействие, которое движущийся автомобиль оказывает на объект, на который оно ударяет, или проникающую способность ускоряющей пули. Когда объект движется с постоянной скоростью, он не набирает и не .
Что такое ШИМ — широтно-импульсная модуляция?
Это современный метод управления уровнем мощности подаваемой к нагрузке, заключающийся в изменении продолжительности импульса при постоянной частоте их следования. Это технология модуляции сигнала за счет вариативного изменения ширины импульсов, а не выходного напряжения. ШИМ преобразователь может быть аналоговый, цифровой и пр.
Широтно-импульсная модуляция — важнейшие параметры:
- Т -период тактирования — промежутки времени, через которые подаются импульсы.
- Длительность импульса — время пока подается сигнал.
- Скважность — рассчитанное по формуле соотношение длины импульса к импульсному Т периоду тактирования.
- D коэффициент заполнения — показатель обратный скважности.
Область применения
Применение ШИМ позволяет увеличить и намного коэффициент полезного действия электрических преобразователей. Тем более это относится к импульсным преобразователям, которые сегодня преимущественно применяются во вторичных источниках питания разных электронных аппаратов. Импульсные преобразователи обратноходовые, прямоходовые 1-тактные, 2-тактные, полумостовые, резонансные управляются с участием ШИМ.
Принцип ШИМ сегодня стал основным для электронных устройств, которым требуется поддержание на заданном уровне выходных параметров и их регулировка. Метод применяется для изменения скорости вращения двигателей, яркости света, управления силовым транзистором БП импульсного типа.
Используется ЩИМ модуляция и в системах управления яркостью светодиодов. Светодиод, благодаря низкой инерционности, успевает мигнуть на частоте всего в несколько десятков кГц. Для человеческого глаза работа светодиода в импульсном режиме воспринимается как свечение. Яркость светодиода зависит от продолжительности импульса в течение одного периода. При коэффициенте заполнения в 50%, то есть, если время свечения равно времени паузы, яркость светодиода составляет одну вторую номинальной величины. Когда появились светодиодные лампы 220В, нашлась проблема повышения их надёжности при нестабильном входном напряжении. Задача была решена разработкой драйвера питания, функционирующего по принципу ШИМ.
Распространение устройств, функционирующих по принципу ШИМ, позволило уйти от линейных трансформаторных БП. В результате чего повысилось КПД и уменьшились масса и габариты источников питания. Поэтому сегодня ШИМ-контроллер является сегодня неотъемлемой частью импульсного БП. Он управляет силовым транзистором и напряжение на выходе блока питания всегда остаётся стабильным. Кроме этого, ШИМ-контроллер:
- обеспечивает плавный пуск преобразователя;
- ограничивает скважность и амплитуду управляющих импульсов;
- контролирует входное напряжение;
- защищает от КЗ силового ключа;
- в аварийной ситуации переводит устройство в деж. режим.
Сегодня широтно-импульсная модуляция применяется повсеместно и позволяет управлять яркостью подсветки ЖК дисплеев мобильных телефонов, смартфонов, ноутбуков. Реализована микросхема ШИМ в сварочных аппаратах, в автоинверторах, в зарядных устройствах и пр. В любом зарядном устройстве используется сегодня ШИМ.

Принцип работы ШИМ
Сигнал, промодулированный по ширине импульса, формируется двумя способами:
- аналоговым;
- цифровым.
При аналоговом способе создания ШИМ-сигнала несущая в виде пилообразного или треугольного сигнала подается на инвертирующий вход компаратора, а информационный – на неинвертирующий. Если мгновенный уровень несущей выше модулирующего сигнала, то на выходе компаратора ноль, если ниже – единица. На выходе получается дискретный сигнал с частотой, соответствующей частоте несущего треугольника или пилы, и длиной импульса, пропорциональной уровню модулирующего напряжения.
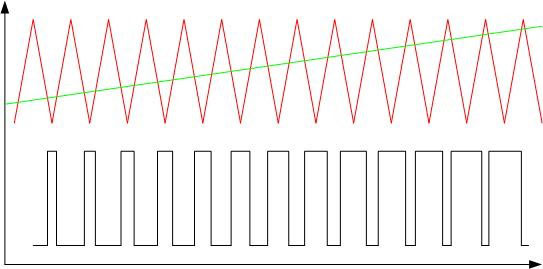
В качестве примера приведена модуляция по ширине импульса треугольного сигнала линейно-возрастающим. Длительность выходных импульсов пропорциональна уровню выходного сигнала.
Аналоговые ШИМ-контроллеры выпускаются и в виде готовых микросхем, внутри которых установлен компаратор и схема генерации несущей. Имеются входы для подключения внешних частотозадающих элементов и подачи информационного сигнала. С выхода снимается сигнал, управляющий мощными внешними ключами. Также имеются входы для обратной связи – они нужны для поддержания установленных параметров регулирования. Такова, например, микросхема TL494. Для случаев, когда мощность потребителя относительно невелика, выпускаются ШИМ-контроллеры со встроенными ключами. На ток до 3 ампер рассчитан внутренний ключ микросхемы LM2596.
Цифровой способ осуществляется применением специализированных микросхем или микропроцессоров. Длина импульса регулируется внутренней программой. Во многих микроконтроллерах, включая популярные PIC и AVR, «на борту» имеется встроенный модуль для аппаратной реализации ШИМ, для получения PWM-сигнала надо активировать модуль и задать параметры его работы. Если такой модуль отсутствует, то ШИМ можно организовать чисто программным методом, это несложно. Этот способ дает более широкие возможности и предоставляет больше свободы за счёт гибкого использования выходов, но задействует большее количество ресурсов контроллера.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Характеристики ШИМ сигнала
Важными характеристиками ШИМ сигнала являются:
- амплитуда (U);
- частота (f);
- скважность (S) или коэффициент заполнения D.
Амплитуда в вольтах задается в зависимости от нагрузки. Она должна обеспечивать номинальное напряжение питания потребителя.
Частота сигнала, модулируемого по ширине импульса, выбирается из следующих соображений:
- Чем выше частота, тем выше точность регулирования.
- Частота не должна быть ниже времени реакции устройства, которым управляют с помощью ШИМ, иначе возникнут заметные пульсации регулируемого параметра.
- Чем выше частота, тем выше коммутационные потери. Он возникают из-за того, что время переключения ключа конечно. В запертом состоянии на ключевом элементе падает все напряжение питания, но ток почти отсутствует. В открытом состоянии через ключ протекает полный ток нагрузки, но падение напряжения невелико, так как проходное сопротивление составляет единицы Ом. И в том, и в другом случае рассеяние мощности незначительно. Переход от одного состояния к другому происходит быстро, но не мгновенно. В процессе отпирания-запирания на частично открытом элементе падает большое напряжение и одновременно через него идёт значительный ток. В это время рассеиваемая мощность достигает высоких значений. Этот период невелик, ключ не успевает значительно разогреться. Но с повышением частоты таких временных промежутков за единицу времени становится больше, и потери на тепло повышаются. Поэтому для построения ключей важно использование быстродействующих элементов.
- При управлении электродвигателем частоту приходится уводить за пределы слышимого человеком участка – 25 кГц и выше. Потому что при более низкой частоте ШИМ возникает неприятный свист.
Эти требования часто находятся в противоречии друг к другу, поэтому выбор частоты в некоторых случаях – это поиск компромисса.
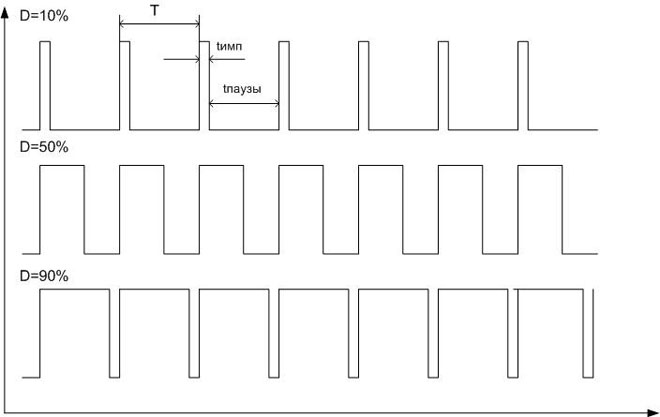
Величину модуляции характеризует скважность. Так как частота следования импульсов постоянна, то постоянна и длительность периода (T=1/f). Период состоит из импульса и паузы, имеющих длительность, соответственно, tимп и tпаузы, причем tимп+tпаузы=Т. Скважностью называется отношение длительности импульса к периоду – S=tимп/T. Но на практике оказалось удобнее пользоваться обратной величиной – коэффициентом заполнения: D=1/S=T/tимп. Еще удобнее выражать коэффициент заполнения в процентах.
В чём отличия ШИМ от ШИР
В зарубежной технической литературе нет отличия между широтно-импульсной модуляцией и широтно-импульсным регулированием (ШИР). Российские же специалисты эти понятия пытаются разграничить. На самом деле ШИМ – это вид модуляции, то есть изменения несущего сигнала под действием другого, модулирующего. Несущий сигнал выполняет роль переносчика информации, а модулирующий задает эту информацию. А широтно-импульсное регулирование – это регулирование режима нагрузки с помощью ШИМ.
Расчет коэффициента заполнения ШИМ
Расчет коэффициента заполнения ШИМ на примере:
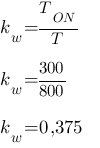
Для расчета процентного коэффициента заполнения необходимо выполнить аналогичные вычисления, а результат умножить на 100%:

Инвертор 12 В/ 220 ВИнвертор с чистой синусоидой, может обеспечивать питание переменно…Подробнее

Как следует из расчета, на данном примере, сигнал (высокого уровня) характеризуется заполнением, равным 0,357 или иначе 37,5%. Коэффициент заполнения является абстрактным значением.
Важной характеристикой широтно-импульсной модуляции может быть также частота сигнала, которая рассчитывается по формуле:
Значение T, в нашем примере, следует взять уже в секундах для того, чтобы совпали единицы в формуле. Поскольку, формула частоты имеет вид 1/сек, поэтому 800ms переведем в 0,8 сек.
Благодаря возможности регулировки ширины импульса можно изменять, например, среднее значение напряжения. На рисунке ниже показаны различные коэффициенты заполнения при сохранении той же частоты сигналов и одной и той же амплитуды.
Для вычисления среднего значения напряжения ШИМ необходимо знать коэффициент заполнения, поскольку среднее значение напряжения является произведением коэффициента заполнения и амплитуды напряжения сигнала.
Для примера, коэффициент заполнения был равен 37,5% (0,357) и амплитуда напряжения U1 = 12В даст среднее напряжение Uср:
В этом случае среднее напряжение сигнала ШИМ составляет 4,5 В.
ШИМ дает очень простую возможность понижать напряжение в диапазоне от напряжения питания U1 и до 0. Это можно использовать, например, для регулировки яркости свечения светодиодов, или скорости вращения двигателя DC (постоянного тока), питающиеся от величины среднего напряжения.
Сигнал ШИМ может быть сформирован микроконтроллером или аналоговой схемой. Сигнал от таких схем характеризуется низким напряжением и очень малым выходным током. В случае необходимости регулирования мощных нагрузок, следует использовать систему управления, например, с помощью транзистора.
Это может быть биполярный или полевой транзистор. На следующих примерах будет использован биполярный транзистор BC547.
Сигнал ШИМ поступает на базу транзистора VT1 через резистор R1, иначе говоря, транзистор VT1 с изменением сигнала то включается, то выключается. Это подобно ситуации, при которой транзистор можно заменить обычным выключателем, как показано ниже:
Когда переключатель замкнут, светодиод питается через резистор R2 (ограничивающий ток) напряжением 12В. А когда переключатель разомкнут, цепь прерывается, и светодиод гаснет. Такие переключения с малой частотой в результате дадут мигающий светодиод.
Однако, если необходимо управлять интенсивностью свечения светодиодов необходимо увеличить частоту сигнала ШИМ, так, чтобы обмануть человеческий глаз. Теоретически переключения с частотой 50 Гц уже не незаметны для человеческого глаза, что в результате дает эффект уменьшения яркости свечения светодиода.
Чем меньше коэффициент заполнения, тем слабее будет светиться светодиод, поскольку во время одного периода светодиод будет гореть меньшее время.
Такой же принцип и подобную схему можно использовать и для управления двигателем постоянного тока. В случае двигателя необходимо, однако, применять более высокую частоту переключений (выше 15-20 кГц) по двум причинам.
Первая из них касается звука, какой может издавать двигатель (неприятный писк). Частота 15-20 кГц является теоретической границей слышимости человеческого уха, поэтому частоты выше этой границы будут неслышны.
Второй вопрос касается стабильности работы двигателя. При управлении двигателем низкочастотным сигналом с малым коэффициентом заполнения, обороты двигателя будут нестабильны или может привести к его полной остановке. Поэтому, чем выше частота сигнала ШИМ, тем выше стабильность среднего выходного напряжения. Также меньше пульсаций напряжения.
Не следует, однако, слишком завышать частоту сигнала ШИМ, так как при больших частотах транзистор может не успеть полностью открыться или закрыться, и схема управления будет работать не правильно. Особенно это относится к полевым транзисторам, где время перезарядки может быть относительно большое, в зависимости от конструкции.
Слишком высокая частота сигнала ШИМ также вызывает увеличение потерь на транзисторе, поскольку каждое переключение вызывает потери энергии. Управляя большими токами на высоких частотах необходимо подобрать быстродействующий транзистор с низким сопротивлением проводимости.
Управляя двигателем постоянного тока с помощью ШИМ, следует помнить о применении диода для защиты транзистор VТ1 от индукционных всплесков, появляющимся в момент выключения транзистора. Благодаря использованию диода, индукционный импульс разряжается через него и внутреннее сопротивление двигателя, защищая тем самым транзистор.
Для сглаживания всплесков питания между клеммами двигателя, можно подключить к ним параллельно конденсатор небольшой емкости (100nF), который будет стабилизировать напряжение между последовательными переключениями транзистора. Это также снизит помехи, создаваемые частыми переключениями транзистора VT1.
ШИМ и микроконтроллеры
Простейший генератор ШИМ можно собрать и без всяких микроконтроллеров, только лишь с микросхемой таймера 555. Разумеется, любой микроконтроллер тоже умеет работать с ШИМ сигналом.
Например, у платы Ардуино имеется 6 контактов: 3, 5, 6, 9, 10 и 11, которые можно настроить для генерации аппаратного ШИМ. По-умолчанию, на контактах 5 и 6 частота сигнала будет 1кГц, на остальных — скромные 500Гц. Как ими пользоваться ШИМ на Ардуино подробно рассказывается на уроке «Ардуино: ШИМ» (скоро будет).
STM32F103 — гораздо более серьёзный микроконтроллер. У него целых 20 контактов имеют возможность генерации ШИМ. Частота этого микроконтроллера — 72МГц, что делает возможным плавное и точное управление моторами постоянного тока, не говоря уже о светодиодах. Узнаём подробности в уроке про STM32 и ШИМ.
Кстати, микроконтроллеры умеют не только генерировать ШИМ, но и детектировать подобные сигналы.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в этой статье. Он построен на базе микросхемы NE555 и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
ШИМ — широтно-импульсная модуляция
ШИМ или PWM (англ. Pulse-Width Modulation) — широтно-импульсная модуляция — это метод предназначен для контроля величины напряжения и тока. Действие ШИМ заключается в изменении ширины импульса постоянной амплитуды и постоянной частотой.
Свойства ШИМ регулирования используются в импульсных преобразователях, в схемах управления двигателями постоянного тока или яркостью свечения светодиодов.
Принцип действия ШИМ
Принцип действия ШИМ, как указывает на это само название, заключается в изменении ширины импульса сигнала. При использовании метода широтно-импульсной модуляции, частота сигнала и амплитуда остаются постоянными. Самым важным параметром сигнала ШИМ является коэффициент заполнения, который можно определить по следующей формуле:
Также можно отметить, что сумма времени высокого и низкого сигнала определяет период сигнала:
![]() где:
где:
- Ton — время высокого уровня
- Toff — время низкого уровня
- T — период сигнала
Время высокого уровня и время низкого уровня сигнала показано на нижнем рисунке. Напряжение U1- это состояния высокого уровня сигнала, то есть его амплитуда.
На следующем рисунке представлен пример сигнала ШИМ с определенным временным интервалом высокого и низкого уровня.
Расчет коэффициента заполнения ШИМ
Расчет коэффициента заполнения ШИМ на примере:

Для расчета процентного коэффициента заполнения необходимо выполнить аналогичные вычисления, а результат умножить на 100%:


Как следует из расчета, на данном примере, сигнал (высокого уровня) характеризуется заполнением, равным 0,357 или иначе 37,5%. Коэффициент заполнения является абстрактным значением.
Важной характеристикой широтно-импульсной модуляции может быть также частота сигнала, которая рассчитывается по формуле:

Значение T, в нашем примере, следует взять уже в секундах для того, чтобы совпали единицы в формуле. Поскольку, формула частоты имеет вид 1/сек, поэтому 800ms переведем в 0,8 сек.
Благодаря возможности регулировки ширины импульса можно изменять, например, среднее значение напряжения. На рисунке ниже показаны различные коэффициенты заполнения при сохранении той же частоты сигналов и одной и той же амплитуды.
Для вычисления среднего значения напряжения ШИМ необходимо знать коэффициент заполнения, поскольку среднее значение напряжения является произведением коэффициента заполнения и амплитуды напряжения сигнала.
Для примера, коэффициент заполнения был равен 37,5% (0,357) и амплитуда напряжения U1 = 12В даст среднее напряжение Uср:

В этом случае среднее напряжение сигнала ШИМ составляет 4,5 В.
ШИМ дает очень простую возможность понижать напряжение в диапазоне от напряжения питания U1 и до 0. Это можно использовать, например, для регулировки яркости свечения светодиодов, или скорости вращения двигателя DC (постоянного тока), питающиеся от величины среднего напряжения.
Сигнал ШИМ может быть сформирован микроконтроллером или аналоговой схемой. Сигнал от таких схем характеризуется низким напряжением и очень малым выходным током. В случае необходимости регулирования мощных нагрузок, следует использовать систему управления, например, с помощью транзистора.
Это может быть биполярный или полевой транзистор. На следующих примерах будет использован биполярный транзистор BC547.
Пример управления светодиодом при помощи ШИМ.
Сигнал ШИМ поступает на базу транзистора VT1 через резистор R1, иначе говоря, транзистор VT1 с изменением сигнала то включается, то выключается. Это подобно ситуации, при которой транзистор можно заменить обычным выключателем, как показано ниже:
Упрощенная схема управления светодиодом.
Когда переключатель замкнут, светодиод питается через резистор R2 (ограничивающий ток) напряжением 12В. А когда переключатель разомкнут, цепь прерывается, и светодиод гаснет. Такие переключения с малой частотой в результате дадут мигающий светодиод.
Однако, если необходимо управлять интенсивностью свечения светодиодов необходимо увеличить частоту сигнала ШИМ, так, чтобы обмануть человеческий глаз. Теоретически переключения с частотой 50 Гц уже не незаметны для человеческого глаза, что в результате дает эффект уменьшения яркости свечения светодиода.
Чем меньше коэффициент заполнения, тем слабее будет светиться светодиод, поскольку во время одного периода светодиод будет гореть меньшее время.
Такой же принцип и подобную схему можно использовать и для управления двигателем постоянного тока. В случае двигателя необходимо, однако, применять более высокую частоту переключений (выше 15-20 кГц) по двум причинам.
Первая из них касается звука, какой может издавать двигатель (неприятный писк). Частота 15-20 кГц является теоретической границей слышимости человеческого уха, поэтому частоты выше этой границы будут неслышны.
Второй вопрос касается стабильности работы двигателя. При управлении двигателем низкочастотным сигналом с малым коэффициентом заполнения, обороты двигателя будут нестабильны или может привести к его полной остановке. Поэтому, чем выше частота сигнала ШИМ, тем выше стабильность среднего выходного напряжения. Также меньше пульсаций напряжения.
Не следует, однако, слишком завышать частоту сигнала ШИМ, так как при больших частотах транзистор может не успеть полностью открыться или закрыться, и схема управления будет работать не правильно. Особенно это относится к полевым транзисторам, где время перезарядки может быть относительно большое, в зависимости от конструкции.
Слишком высокая частота сигнала ШИМ также вызывает увеличение потерь на транзисторе, поскольку каждое переключение вызывает потери энергии. Управляя большими токами на высоких частотах необходимо подобрать быстродействующий транзистор с низким сопротивлением проводимости.
Управляя двигателем постоянного тока с помощью ШИМ, следует помнить о применении диода для защиты транзистор VТ1 от индукционных всплесков, появляющимся в момент выключения транзистора. Благодаря использованию диода, индукционный импульс разряжается через него и внутреннее сопротивление двигателя, защищая тем самым транзистор.
Схема системы управления скоростью вращения двигателя постоянного тока с защитным диодом.
Для сглаживания всплесков питания между клеммами двигателя, можно подключить к ним параллельно конденсатор небольшой емкости (100nF), который будет стабилизировать напряжение между последовательными переключениями транзистора. Это также снизит помехи, создаваемые частыми переключениями транзистора VT1.